dag334.github.io
Showcasing projects created in ECE 3400 (Intelligent Physical Systems)
Lab 1: Intro to the Arduino, Servos & US Sensors
In this lab, we built and programmed a robot using a 9V battery, four AA batteries, two servos, three ultrasonic sensors, and an Arduino Nano Every to navigate through a simple maze.
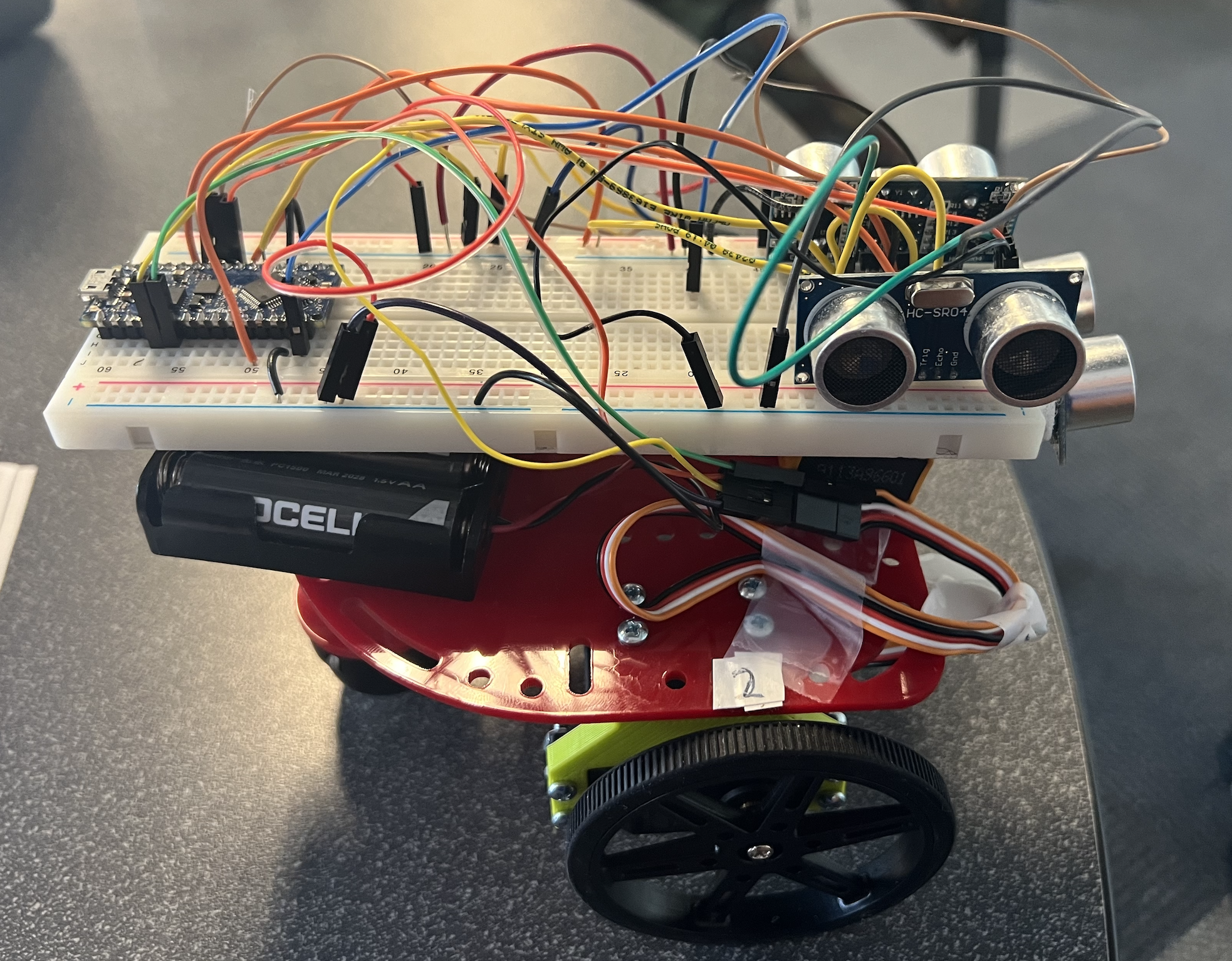
Fig. 1: Navigating Robot Before Testing
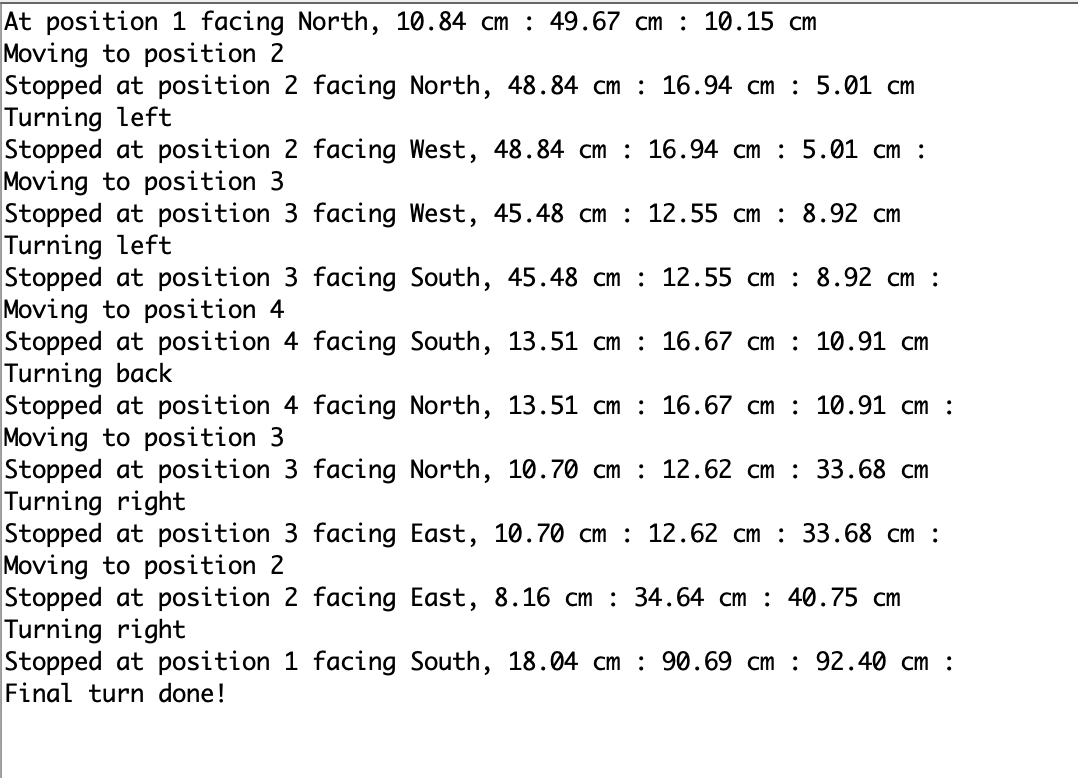
Fig. 2: Screenshot of Serial Monitor Printout while Running
The navigating robot will do the following:
- Start in position 1, immobile.
- Once you press the RESET button on the Nano, it will remain motionless for 1 second, then head North towards position 2.
- Once at position 2, it will turn smoothly in place to its left to face West, then navigate towards position 3.
- Once at position 3, it will turn smoothly in place to its left to face South, then navigate towards position 4.
- Once at position 4, it will turn smoothly in place to its right to face North, then navigate towards position 3.
- Once at position 3, it will turn smoothly in place to its right to face East, then navigate towards position 2.
- Once at position 2, it will turn smoothly in place to its right to face South, then navigate towards position 1.
- Once at position 1, it will turn smoothly in place to its left 540 degrees (1 ½ turns) ending facing North where it will remain in place stationary.
Fig. 3: Robot navigating a simple maze