Lab 1: Microcontrollers
Overview
The goal of Lab 1 was to accustom us to the many functionalities of the Arduino UNO and the Arduino IDE, such as using analog and digital input/outputs and driving peripheral devices (LED, Servos, etc). The finished product was to create an assembled robot that drives autonomously. Through this lab’s entirety, all four of us worked together as one team. We didn’t break into subteams of two but we did tend to work in our area of specialty. For example, Ryan and Joy worked primarily on the code, Dan and Jinny worked heavily on the circuits and wiring, and we all helped assemble the robot. The following report is an in-depth review of our work on this first lab.
Materials
- 1 Arduino Uno
- 1 USB A/B Cable
- 1 Continuous rotation servos
- 1 Pushbutton
- 1 LED (red)
- 1 Potentiometer
- Several resistors (kΩ range)
- 1 Solderless breadboard
Using and Modifying the Blink Sketch
The first task was to use the provided Blink example code to light up an internal LED for 1 second and turn it off for 1 second, looping repeatedly. A video is displayed below showing the results.
Next, we took the Blink sketch and modified it to light up an external red LED. To do this, we placed a red LED on the breadboard, wired it through a 330Ω resistor to limit the current through the LED, and connected it to an output pin on the Arduino. We also changed the setup function. The a video showing the results is displayed below, along with final code.
// A simple Arduino program to make an external LED blink
int EXTERNAL_LED = 13;
// the setup function runs once when you press reset or power the board
void setup() {
pinMode(EXTERNAL_LED, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(EXTERNAL_LED, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(EXTERNAL_LED, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
Reading from a Potentiometer
In the second section of the lab, we were tasked with using a potentiometer to figure out how to operate the analog input ports of the Arduino. We first wired up the potentiometer as shown in the following picture: power to 5V, ground to ground, and the output signal through a parallel combination of 330Ω resistors. The resistor that connects to ground acts as the other half of a voltage divider, while the resistor that connects to an analog input port on the Arduino board acts as a current limiter. A simple schematic is also shown below.


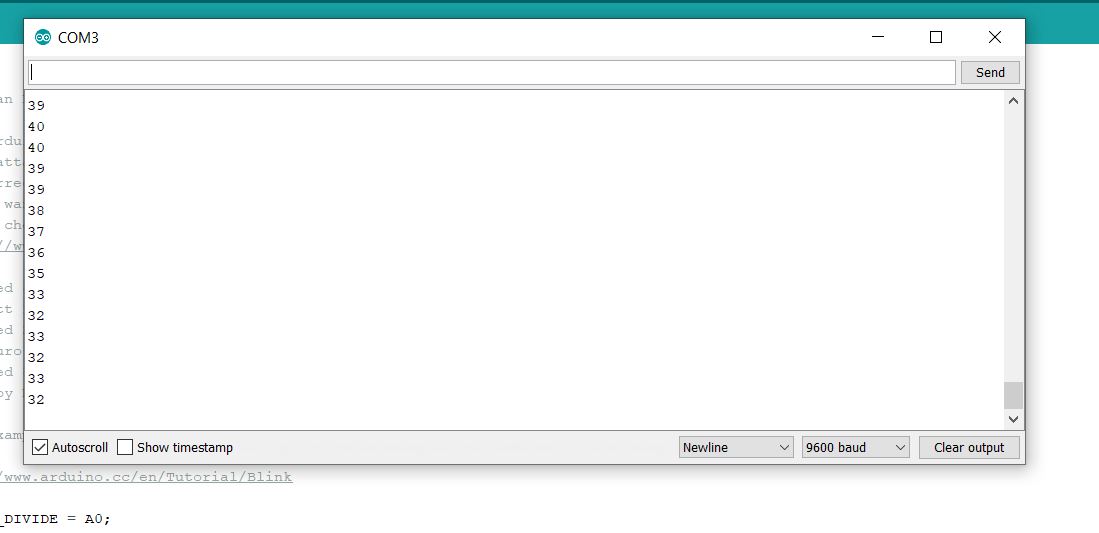
We then tested the output readings through serial communication. A snippet of the output stream printed to COM3 as we turned the potentiometer is shown below, as is the code we used to read the voltage level.
// This program allows us to continuous read the voltage
// across a voltage divider by turning the potentiometer
int VOLT_DIVIDE = A0;
// the setup function runs once when you press reset or power the board
void setup() {
pinMode(VOLT_DIVIDE, INPUT);
Serial.begin(9600);
}
// the loop function runs over and over again forever
void loop() {
Serial.println(analogRead(VOLT_DIVIDE)); // Print out the value being read from the analog pin
delay(500); // wait for half a second
}
We were also tasked with adjusting the brightness of an LED with the potentiometer. To do this, we left our potentiometer on the board as it was in the previous section. We then wired a red LED to digital output 3 through a 330Ω resistor. We selected port 3 because it has pulse width modulation capabilities, which we need to vary the brightness of the LED as we turn the potentiometer. Finally, we modified the code from the previous section so that we now write to port 3 based on the voltage reading. We divided the voltage by 2 and wrote that value to the LED because based on some experimenting, that mapping produced the greatest change in brightness as the potentiometer was turned. A clip of the results are shown below, along with the modified code that was used.
// This program allows us to control the brightness of an LED by turning the potentiometer
int VOLT_DIVIDE = A5;
int LED = 3;
int v = 0;
// the setup function runs once when you press reset or power the board
void setup() {
pinMode(VOLT_DIVIDE, INPUT);
pinMode(LED, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
v = analogRead(VOLT_DIVIDE);
analogWrite(LED, v/2);
}
Driving A Servo
In this next portion of the lab, we were tasked with driving a servo using the Arduino. The servos will be the driving the wheels of our robot later on.
For our first task, we wired a servo up to the Arduino as follows: power to 5V, ground to ground, and input of the servo through a 330Ω resistor to a PWM-capable digital output on the Arduino. We then played with some values to send from the Arduino to the servo to see how it works. We found that from 0-80 and from 100-180, the servo was at roughly the same speed (but in opposite directions for the two ranges), and that from 80-100, each value noticeably altered the speed of the servo. Finally, we created a for loop to sweep the full range of values to the servo. The results of this sweep, as well as the code used, are shown below.
// We used this program to experiment with how the Servo motor rotates to figure out how it functions
#include <Servo.h>
Servo SERVO;
void setup() {
// put your setup code here, to run once:
SERVO.attach(3);
}
void loop() {
// put your main code here, to run repeatedly:
for (int pos = 180; pos >=0; pos -=1) { // to sweep the voltage, found on Arduino Servo Library
SERVO.write(pos);
delay(40);
}
}
After testing the servo alone, we used a potentiometer to adjust the speed and direction at which the servo motor was rotating. We wired up the potentiometer up exactly as it was in the previous section. We also took our code from the previous section that was used to change the LED’s brightness using the potentiometer and modified it slightly. We chose to multiply the voltage by 2 and write that value since the Arduino read voltages in the 30-60 range. Thus, doubling the voltage would put us in the 60-120 range, enabling the servo to rotate in both directions. A clip of the results are shown below, along with the modified code that was used.
// This program allows us to control the rate at which
// the Servo rotates by turning the potentiometer
#include <Servo.h>
Servo SERVO;
int VOLT_DIVIDE = A5;
int v = 0;
void setup() {
// put your setup code here, to run once:
SERVO.attach(3);
pinMode(VOLT_DIVIDE, INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
v = analogRead(VOLT_DIVIDE);
SERVO.write(v*2);
}
Driving Autonomously
The last task in this lab was to build a robot that drives autonomously.
We first had to assemble the robot. This was not a very enjoyable experience since we were in the last lab section and had to fight for the best of the scraps. For example, there were two ball bearings left for us to choose from, but one was too short and the other one was too tall. We had originally attached the smaller one to our robot but eventually found a saw to cut the tall one down to the right size so we ended up using that. Furthermore, there seemed to be a shortage of nuts and screws of varying sizes, and the allen keys that would have been used to screw them in were also missing, so we had to screw everything together with our hands and a set of pliers. All of this took a lot of time to sort out and inhibited us from performing at a higher level as a team.
Once we had painstakingly assembled Axel (we named our robot Axel), the rest was relatively straightforward. We ultimately decided to have him drive in a figure eight. We had to determine the correct servo speeds to have the robot make 90 degree left and right turns that followed a grid. It took a little trial and error, but it didn’t take long at all. When coding the program, we decided to create simple functions and then build upon them in larger functions so that we wouldn’t have to change much through our experimentation. This helped to make the code extremely readable and reusable. The final code and video results are shown below.
// This program allows the robot to "autonomously" move in a figure eight
#include <Servo.h>
Servo right;
Servo left;
int right_pin = 11;
int left_pin = 10;
void leftTurn(int t) {
left.write(0);
right.write(60);
delay(t);
}
void rightTurn(int t) {
left.write(120);
right.write(180);
delay(t);
}
void moveForward(int t) {
left.write(180);
right.write(0);
delay(t);
}
void rightSquare() {
for (int i = 0; i < 4; i++) {
moveForward(3000);
rightTurn(670);
}
}
void leftSquare() {
for (int i = 0; i < 4; i++) {
moveForward(3000);
leftTurn(670);
}
}
void figureEight() {
for (int i = 0; i < 4; i++) {
moveForward(3000);
leftTurn(668);
}
for (int i = 0; i < 4; i++) {
moveForward(3000);
rightTurn(668);
}
}
void setup() {
// put your setup code here, to run once:
right.attach(right_pin);
left.attach(left_pin);
}
void loop() {
// put your main code here, to run repeatedly:
figureEight();
}
Conclusion
While this lab was relatively straightforward and even fun at times, the assembly part was extremely frustrating. However, the hardest part is over and we’re excited to continue work on Axel.