Important Note
I worked extensively on this lab with Joey Horwitz (jah569). His website can viewed here.
Specifications of the Car
The dimensions of the car are 7 inches long, 5.5 inches wide, and 3 inches tall (2.5 inches from floor to top of the body). We estimated the battery life to be around 18 minutes when using the car fairly consistently. We expect the battery life to be shorter if it just ran consistently at full speed. The battery charged from dead to full in around 1 hour and 15 minutes.
Maximum Velocity of the Car
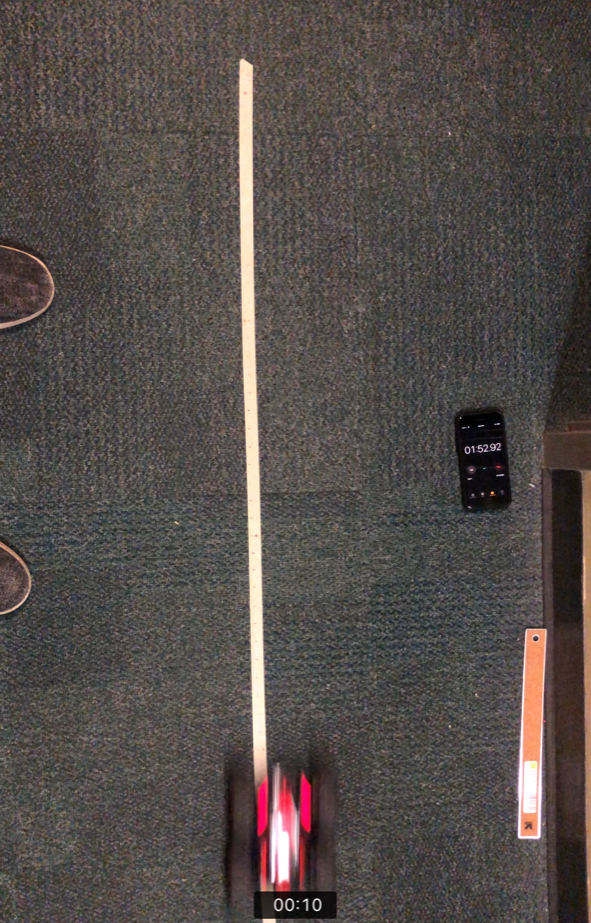
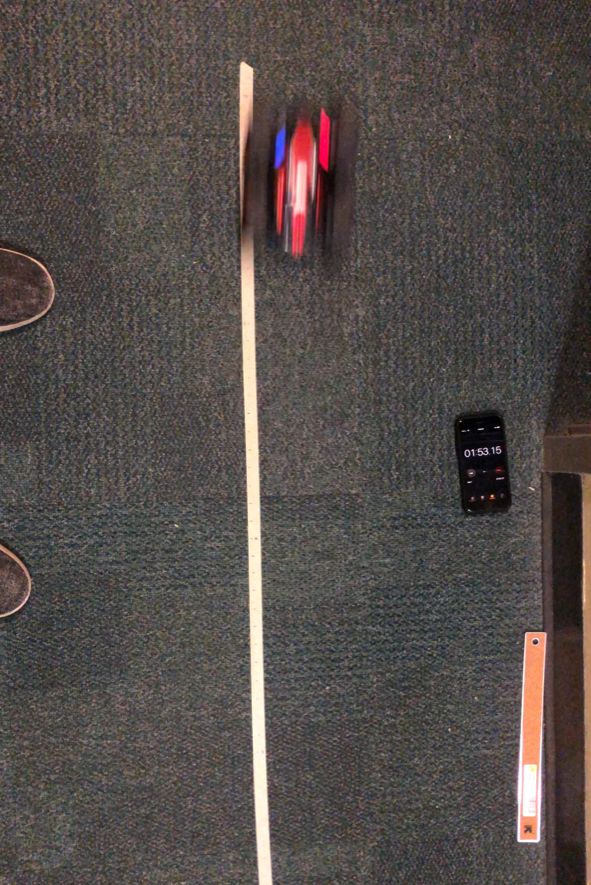
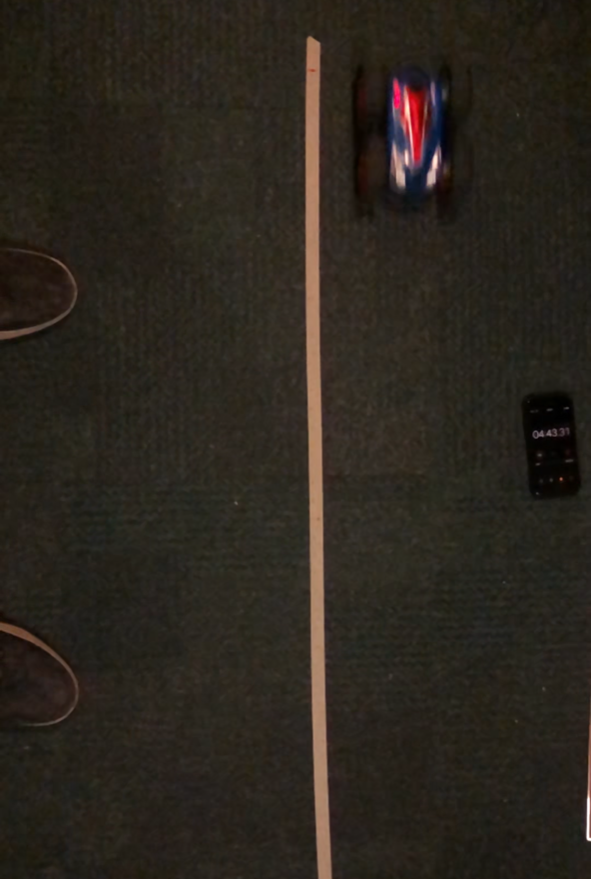
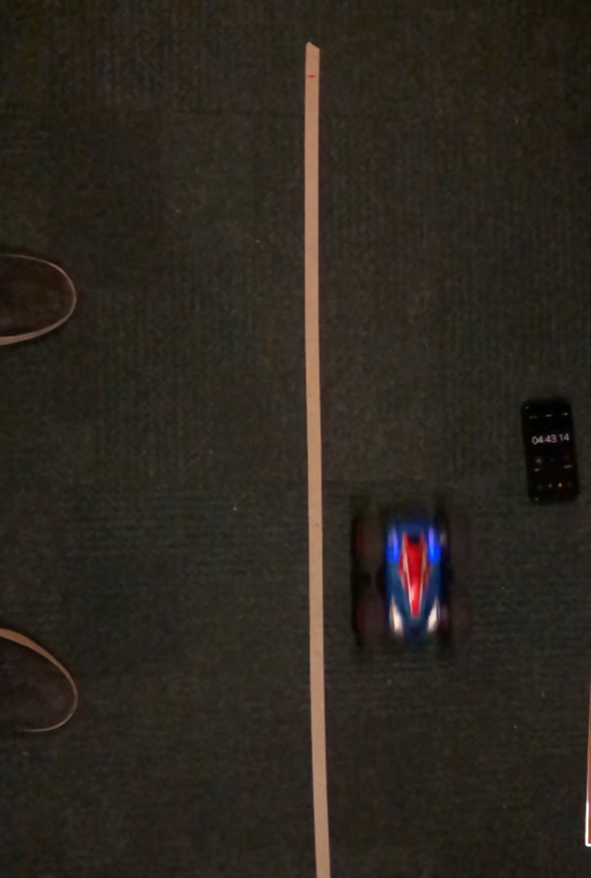
We calculated the maximum velocity by making a piece of tape, with precise inch marks, on the floor, and recording a video of the car moving at maximum velocity. There was also a stopwatch in the frame to see the precise times when the car hit certain marks on the tap. From there, We determined the exact frame of where the car was positioned in space and time and did a simple calculation. From two videos, one a regular video and the other a slow-motion video, We determined the max velocity was 13.04 ft/s or 3.975 m/s, and 11.76 ft/s or 3.584 m/s, respectively. Thus producing an average velocity of 3.780 m/s. Below are the videos used, and the exact moments of measurement.
Other Movement Observations
We tested the car on a carpet and tile surface. We noticed it was much harder to flip the car on the tile than on the carpet. We also tested the car's ability to turn on its axis on both surfaces. In both cases, the car drifted slightly while rotating. In both cases, We attributed the drift to be caused by excessive rocking because the car was moving at full speed. We believe if the car turned at a slower speed, it could reliably turn on its axis without drift. Also, please note that when the car was rotating on the tile, the tile floor was not flat and the car slowly drifted down that small slope, which is the main contributing fact to the drift. The videos of the car rotating on both surfaces are below.
Stunts
We tried to perform some stunts, but it was difficult because the controller had zero sensitivity. The only inputs were max throttle. We also tried to balance the car on a set of two wheels, but with only minimal success. Below is a video of us flipping the car reliability a few times.
Reasoning
It is important to know the battery life of the car, so the robot does not die in the middle of its goal. I believe the max velocity is an important thing to know too because it may be required to know how fast the robot can go from point to another. Additionally, determining how well the car can rotate is important for making tight turns, and collecting data from various directions at a particular point. Finally, it was important to play around with the car and to see what stunts the car could do, so we know the limitations of the cars movement.