JEFS the Robot
Our robot, named JEFS after the first letters of our names, is able to do many things...
- Detect lines, line correct and turn right/left
- Detect walls and avoid them
- Start via a pushbutton
- Differentiate a 950Hz frequency from other frequencies
- Detect and avoid other robots (by reading the other robot's ir emitter)
- Do a depth first search of the maze
- Communicate via radios to an FPGA monitor
One of JEFS more unique qualities is the schmidtt trigger we implemented that converts the analog line sensor values to digital values in order to free the analog pins on the arduino for other inputs/outputs. Additionally, JEFS implements a DFS algorithm without stacks or recursion in order to limit Arduino memory usage, only using about 20-25% of memory. We also used the FHT library instead of the FFT library to reduce dynamic memory usage.
Below, we have pictures of JEFS and our base station.
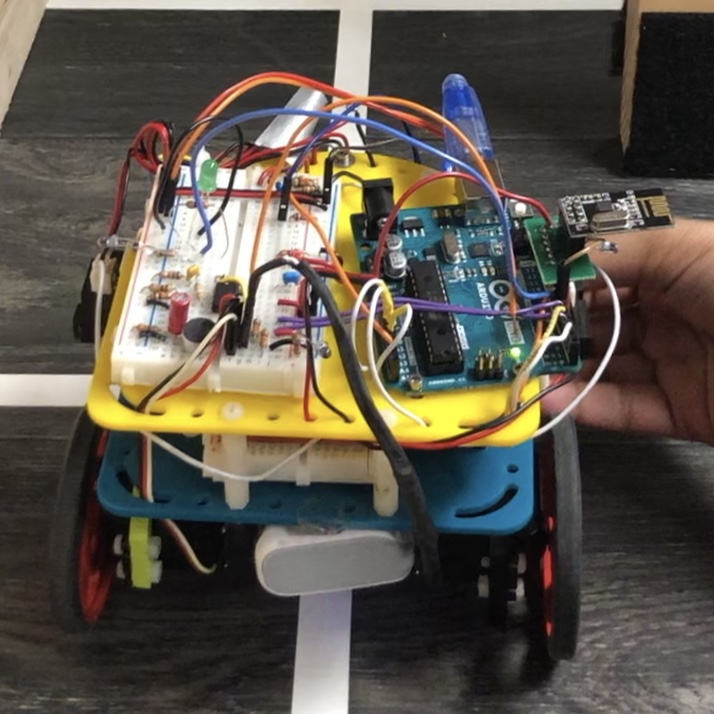 JEFS from the top
JEFS from the top
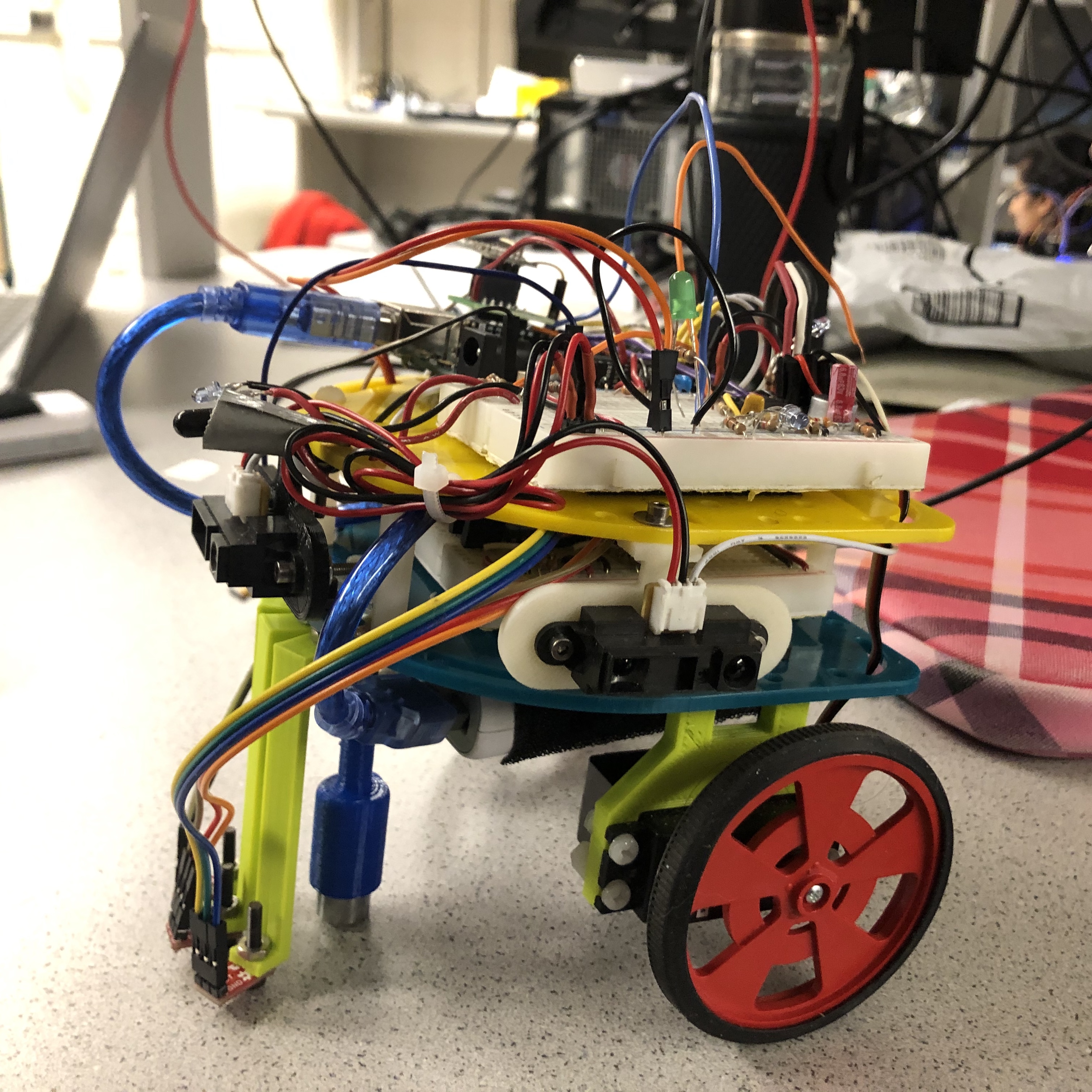 JEFS from the side
JEFS from the side
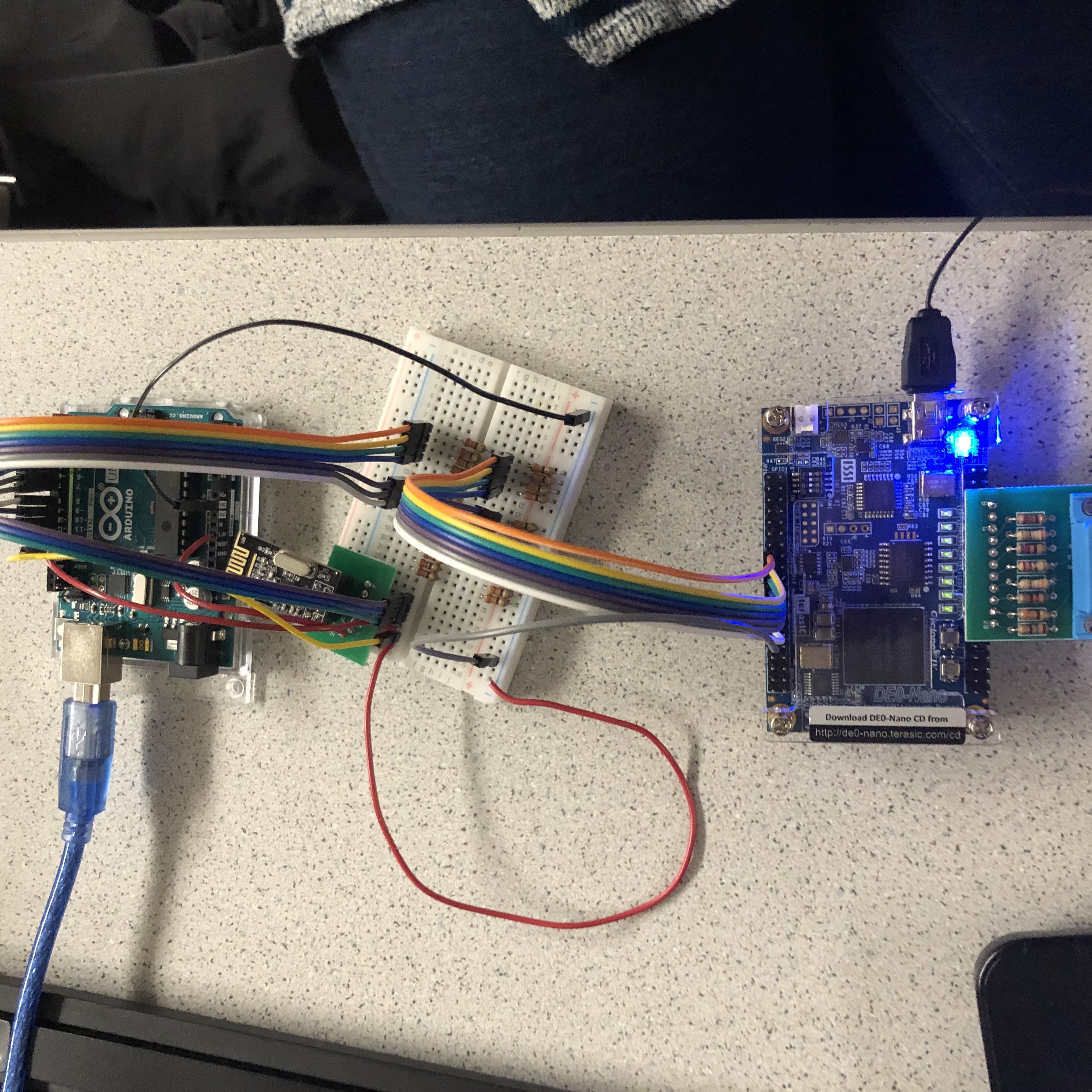 Base station
Base station
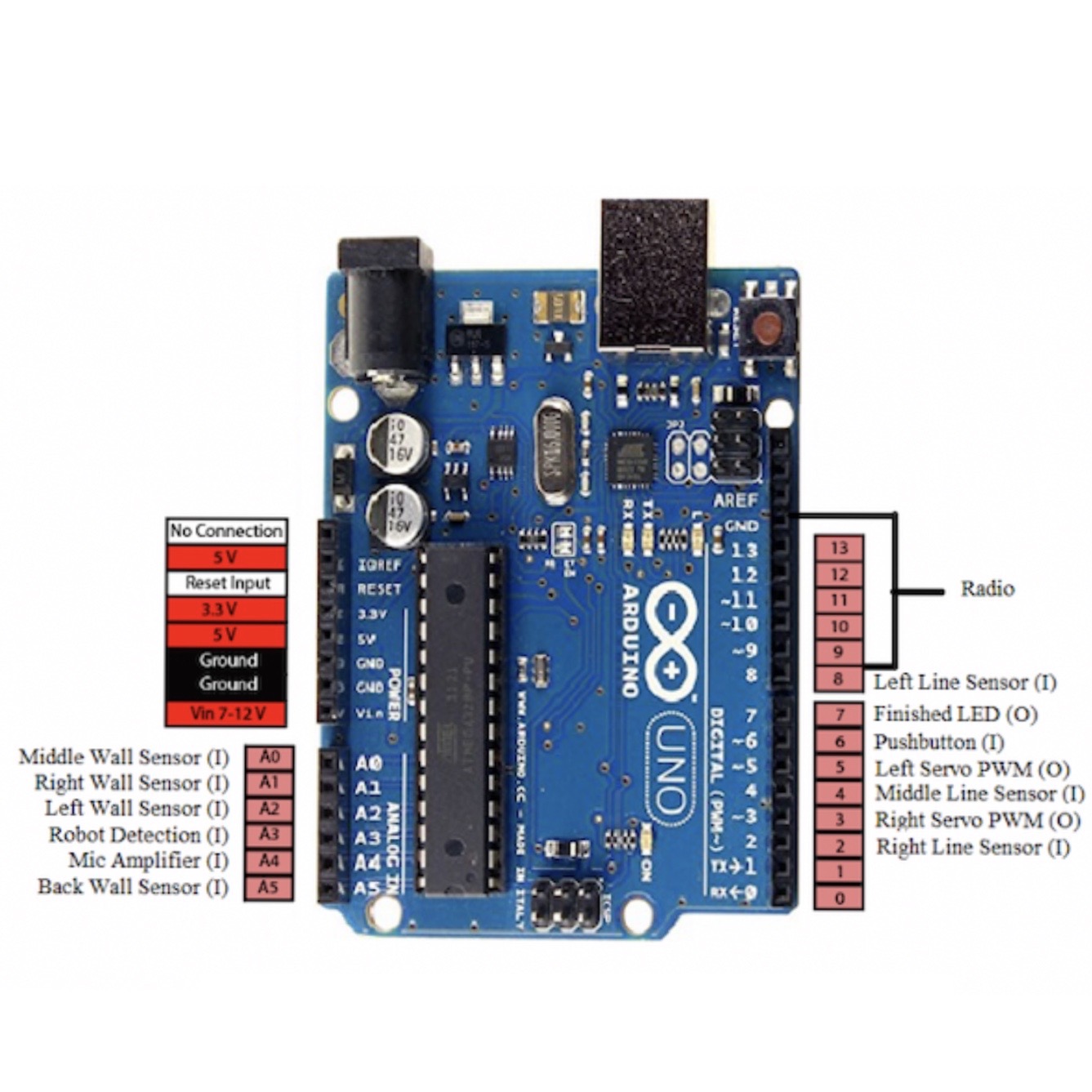 Arduino connections
Arduino connections
Team Members
 Julia Ng
Julia Ng
 Eric Ma
Eric Ma
 Fareeza Hasan
Fareeza Hasan
 Sabrina Herman
Sabrina Herman
 Team JEFS the day of the competition!
Team JEFS the day of the competition!