Intelligent-Physical-Systems
Project maintained by jim59 Hosted on GitHub Pages — Theme by mattgraham
Lab 1
For this lab we were able to setup the frame of “BotMobile” (our robot) with servo motors and ultrasonic sensors.
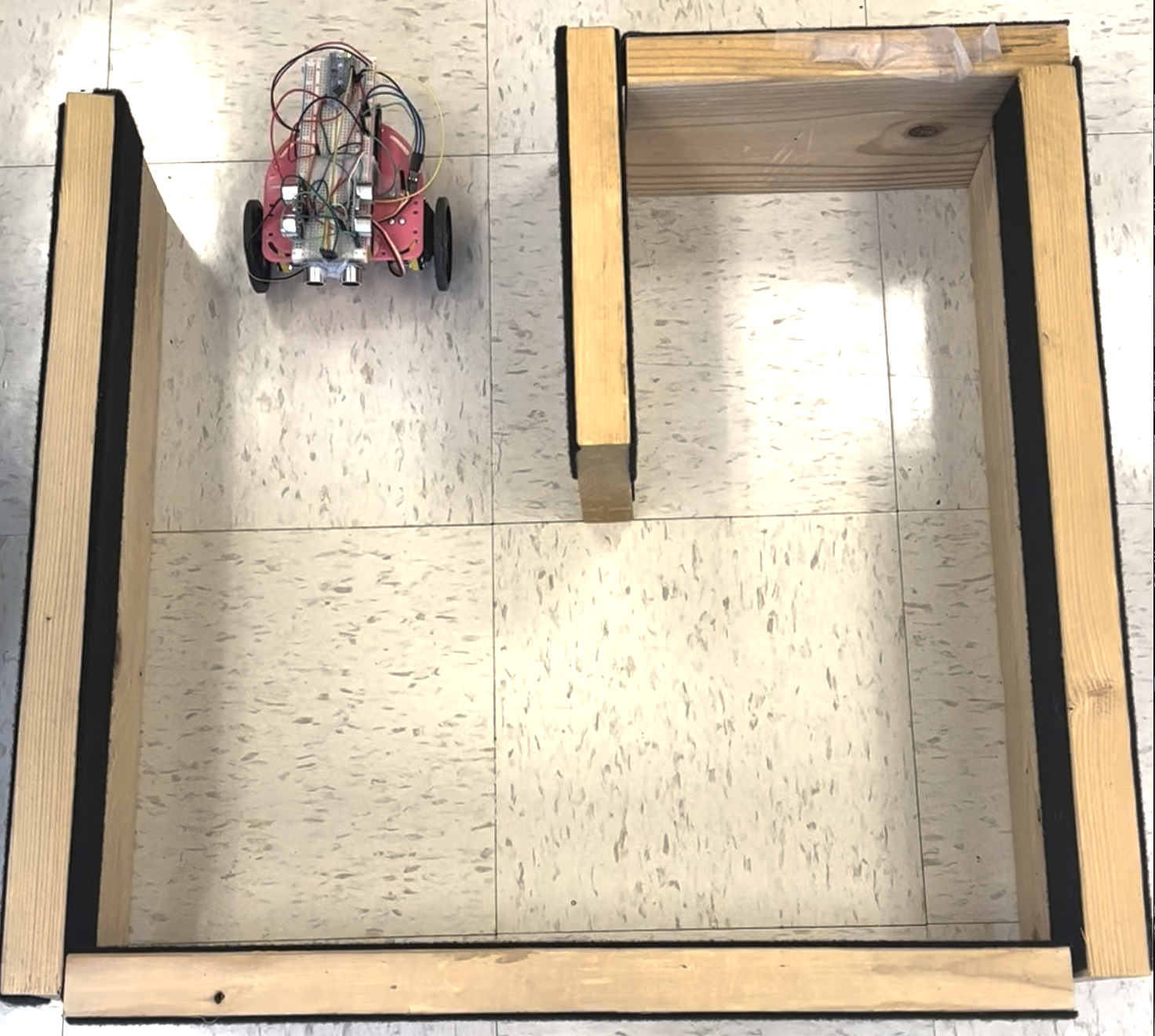
Accomplishment: BotMobile was able to autonomously navigate through a simple maze shown below by moving into the maze and moving outside the maze.
Phase I
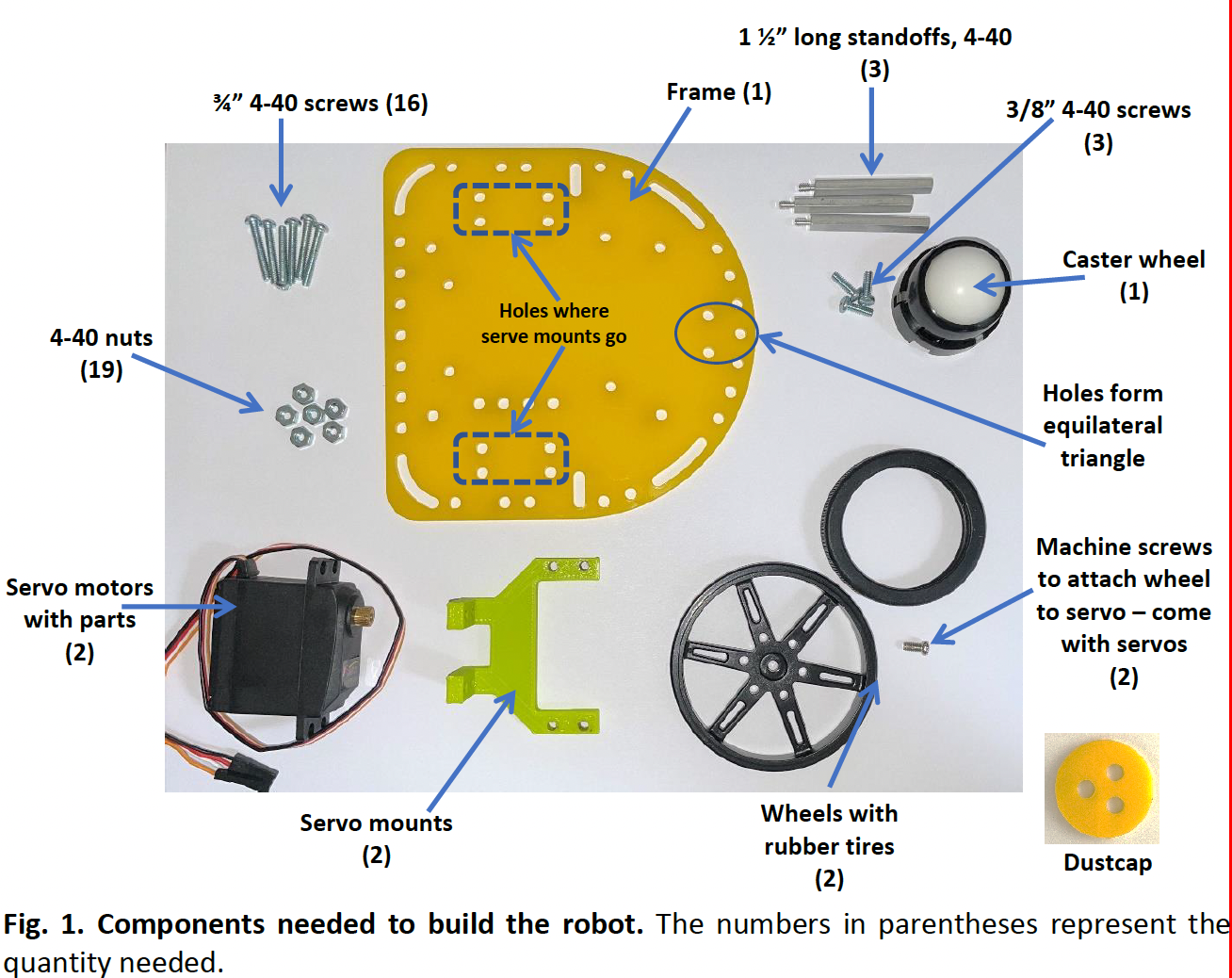
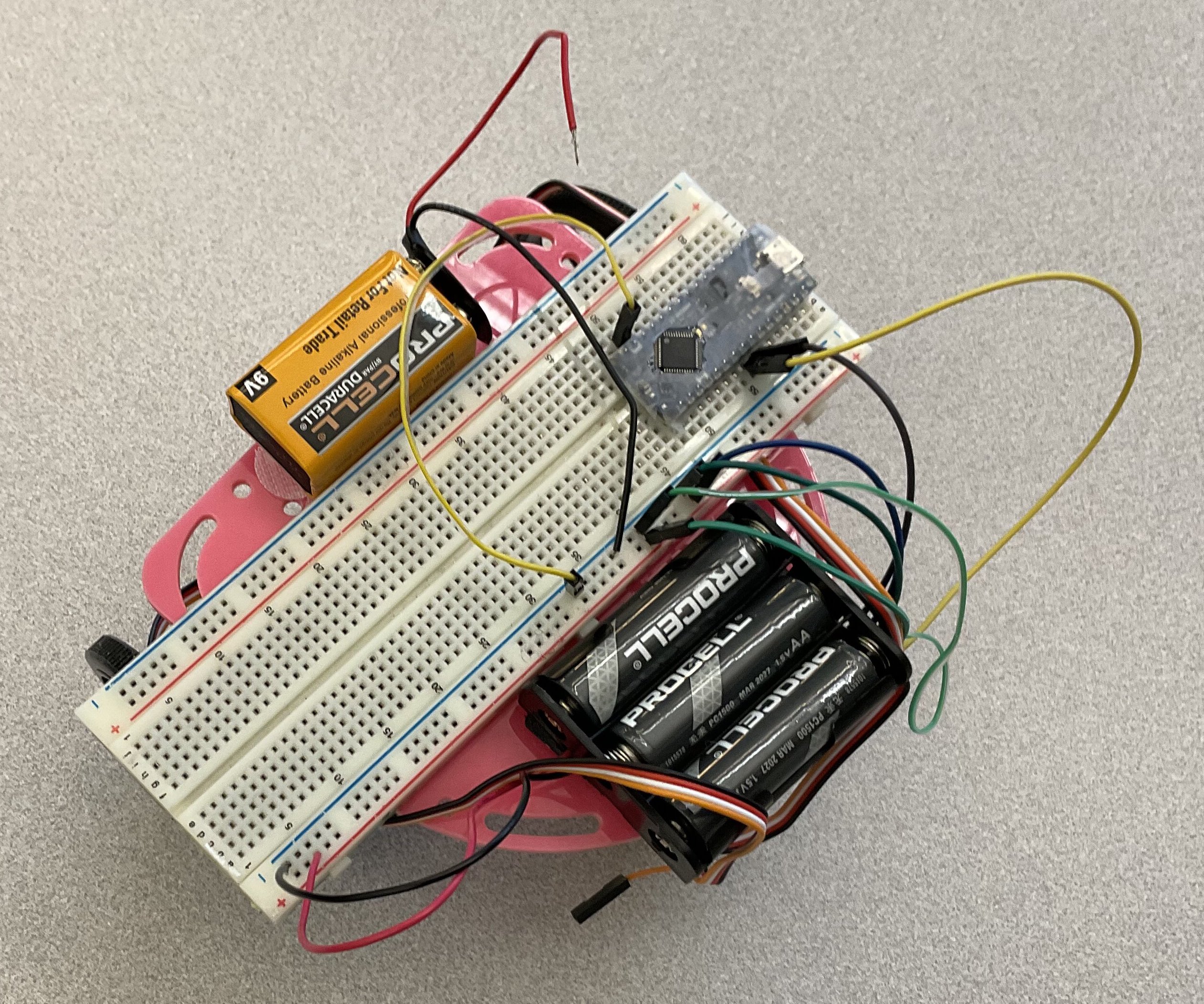
For the first phase of the lab, we assembled the robot from its individual parts: wheels, main frame, servo mounts, and servo motors, AA battery holder for four AA batteries, and a 9V battery for the Arduino Nano. Picture below shows parts used to assemble the robot:
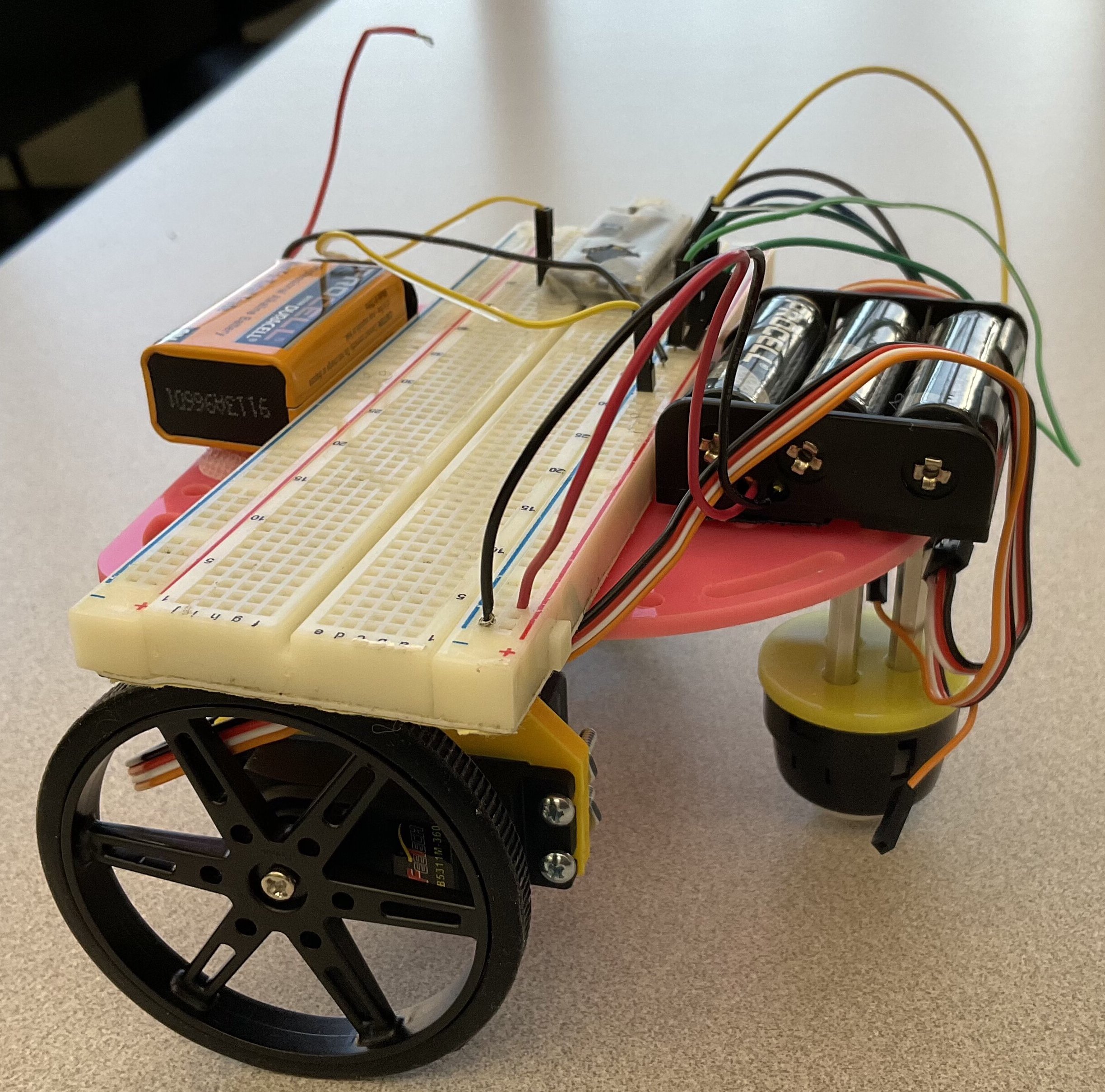
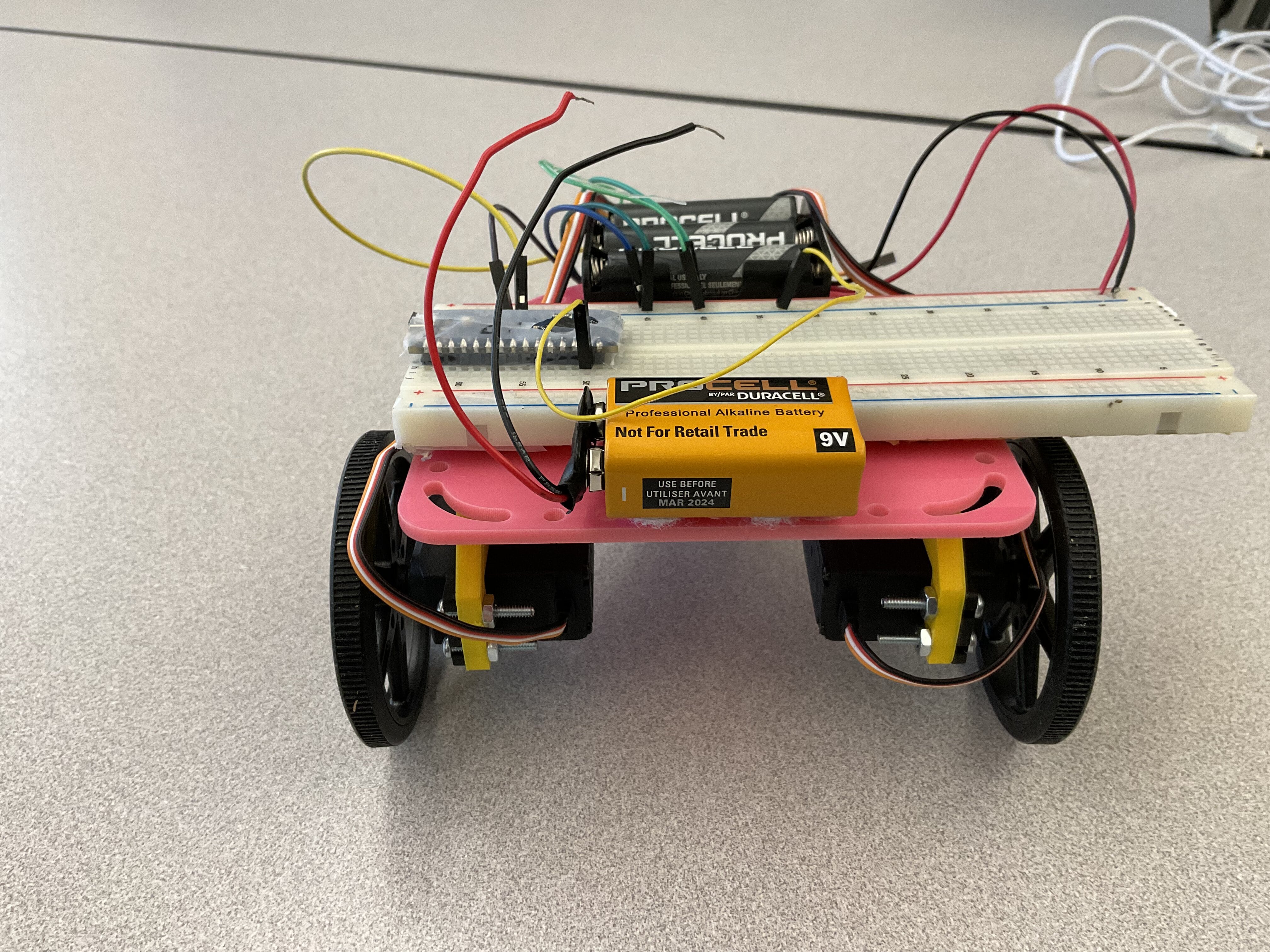
We then mounted the Arduino Nano on a breadboard, wrapped it with tape to protect from electrocution, and fastened the breadboard on the robot frame. After assembling, we then tested the functionality of the servos using an example code provided in the Arduino library and then programmed the robot (specifically the servos) to perform simple movements, such as pivoting 270 degrees and moving a distance of 20cm.
Phase II
For the second phase of the lab, we added three ultrasonic sensors to the robot: one front sensor, one left sensor, and one right sensor. We then connected the ultrasonic sesnors to pins on Arduino Nano and accordingly used a single pin from the Nano as a shared trigger while each echo pin was connected to a different pin on the Arduino Nano. We then programmed the robot to navigate the maze, with the layout shown below, from position 1 to position 4 and back as shown in the video below.

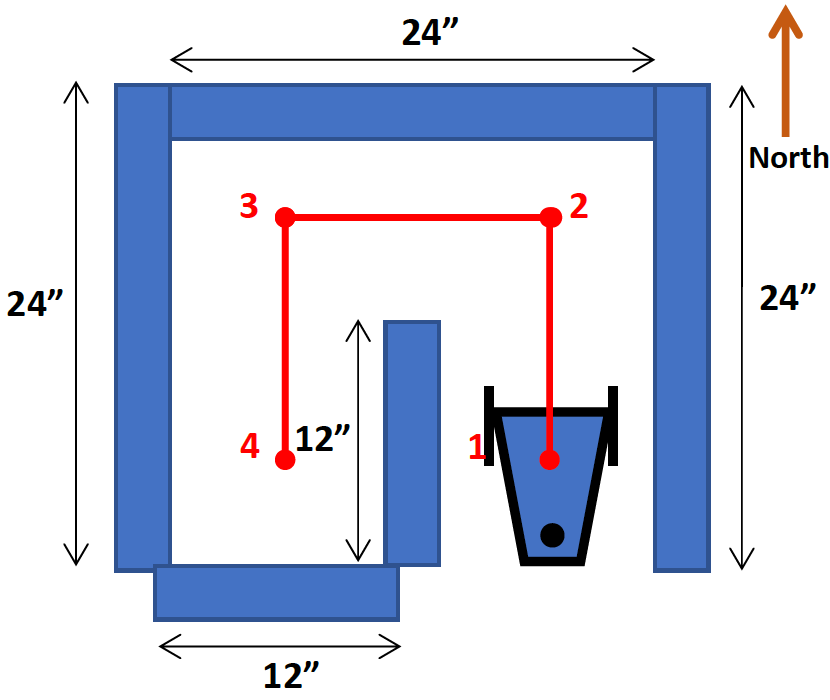
————BotMobile after Phase II ——————————- Maze Layout—————
Video showing navigation of BotMobile through the maze
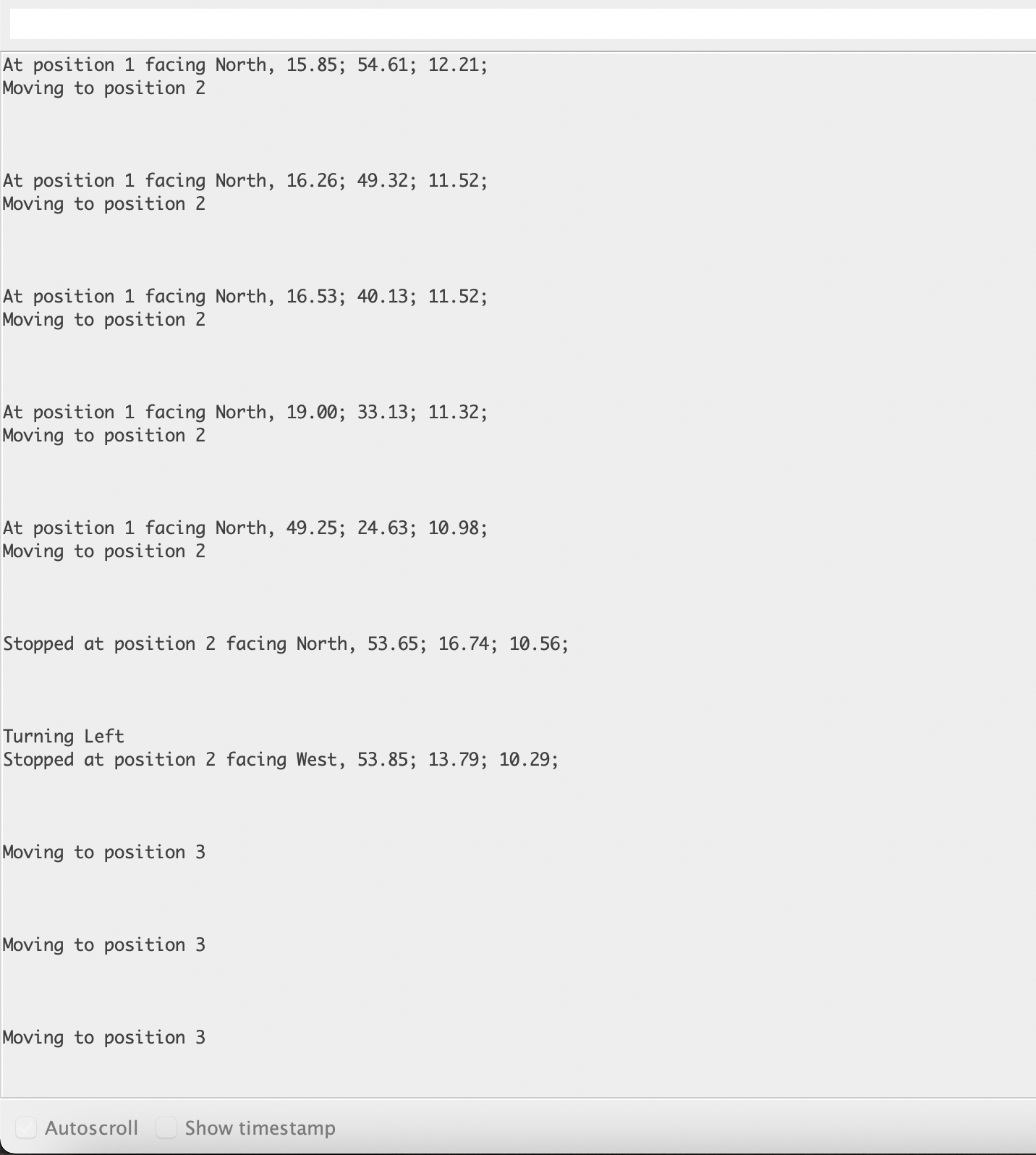
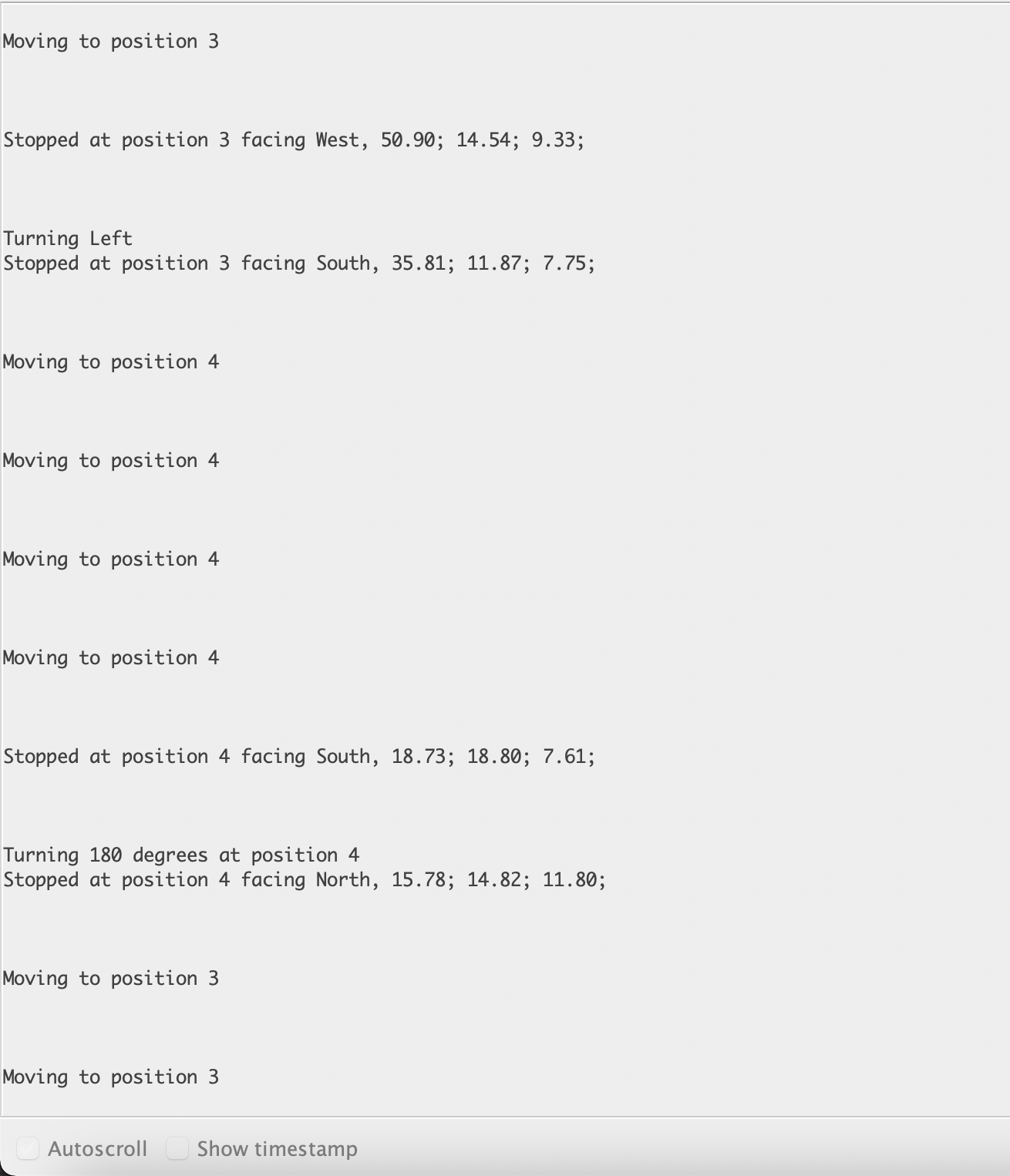
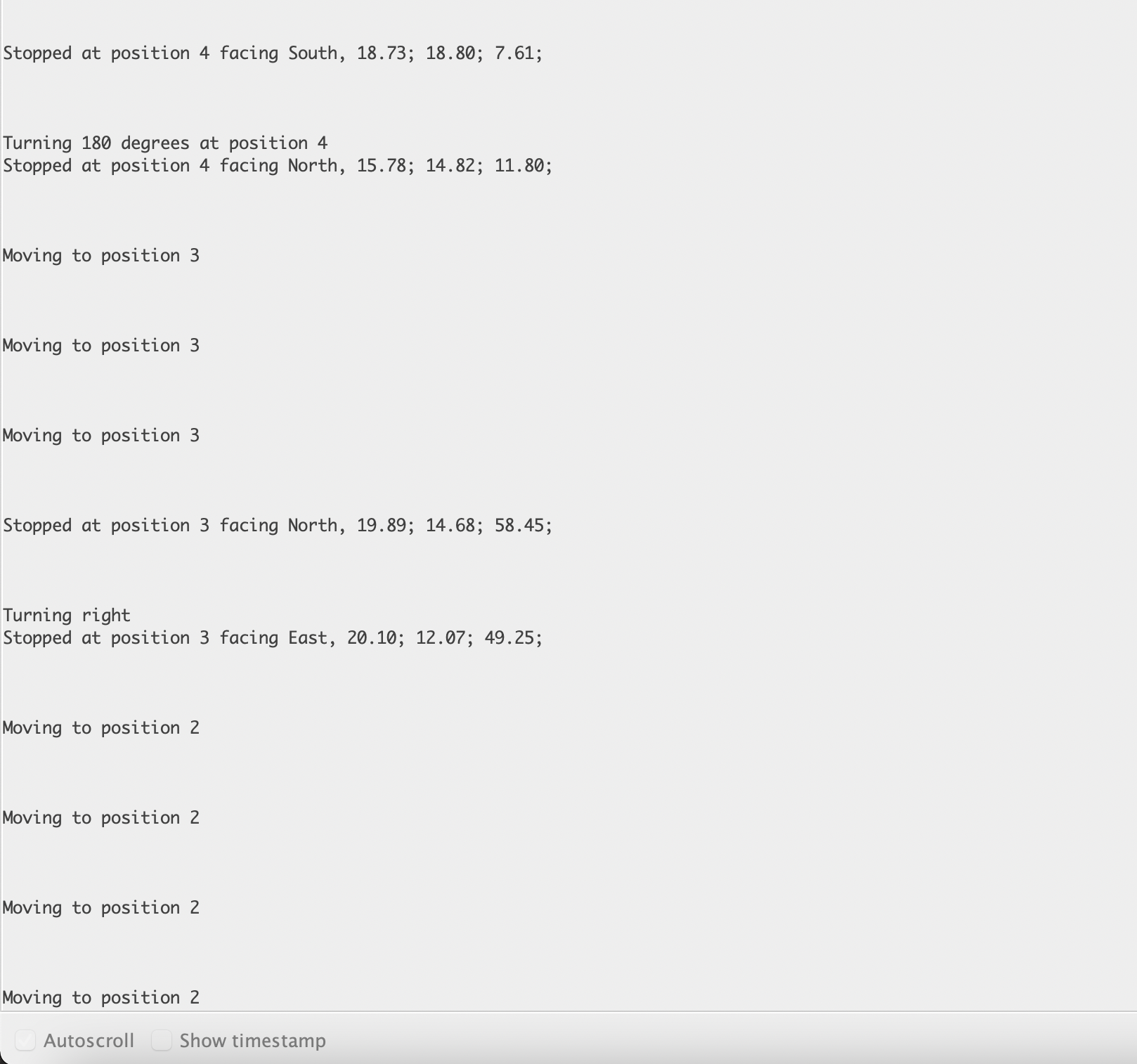
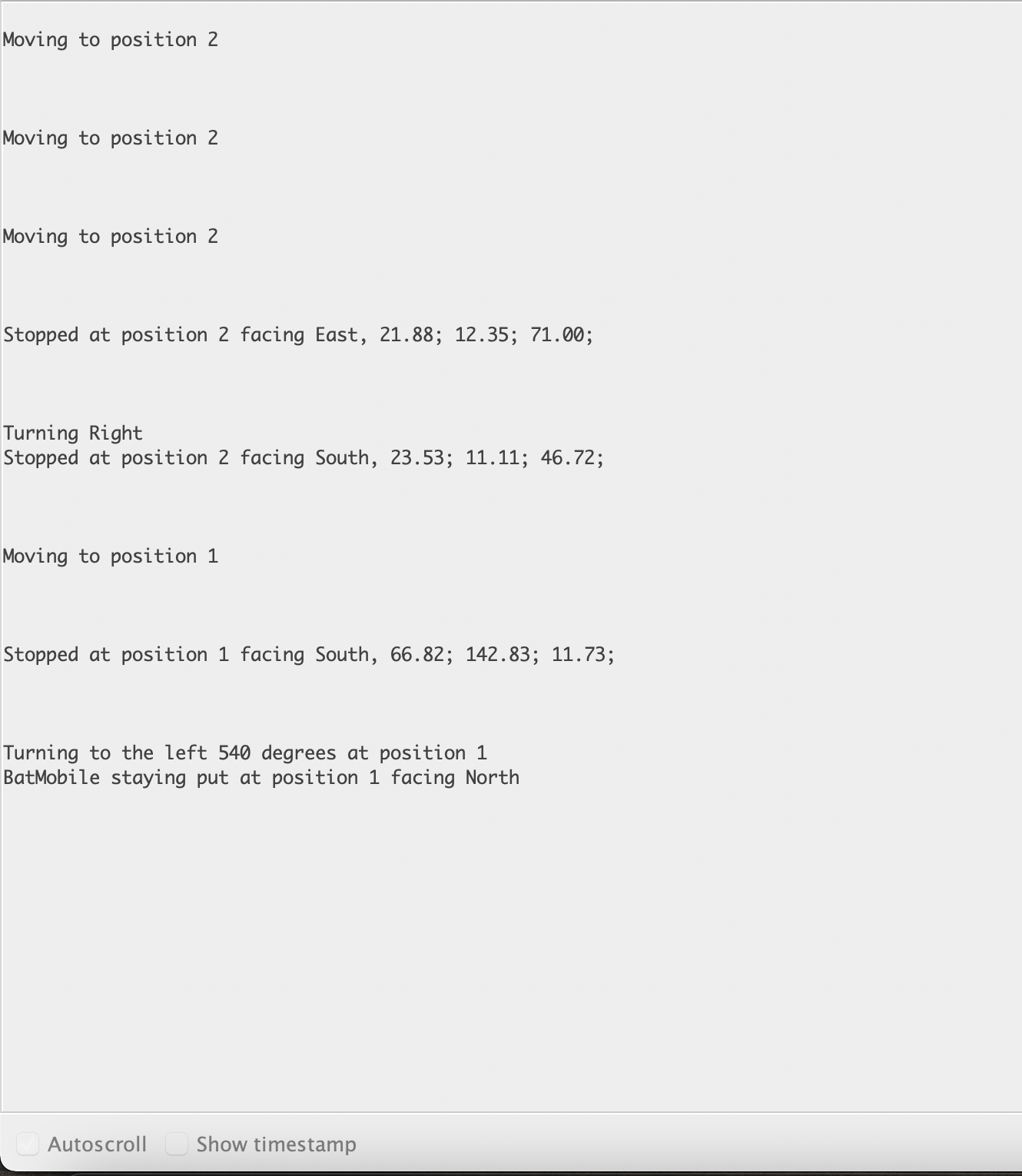
Screenshots of the readings given by the Serial Monitor as BotMobile is moving
Next Steps: Enabling BotMobile to detect treasures placed around the maze using Infrared Sensors.