Competition Day - December 10th, 2019

Overview
Competition was split into three rounds with the top eight teams from round 1 making it to round 2 and the top four teams from round 2 making it to round 3. Since there were so many teams, round 1 was broken up into three segments where eight teams would go at a time split across two identical mazes. Each round consisted of four teams to a maze trying to map out as much as they could within 6 minutes. We were in the first segment of round 1 where our robot mapped out roughly a fifth of the maze, after starting when the correct note was played, while managing to avoid other robots and walls for the most part. Sadly our robot did not earn enough points to get into round 2.
Below is the maze we were mapping for round 1 (left) and what our FPGA ultimately displayed when the round ended (right):
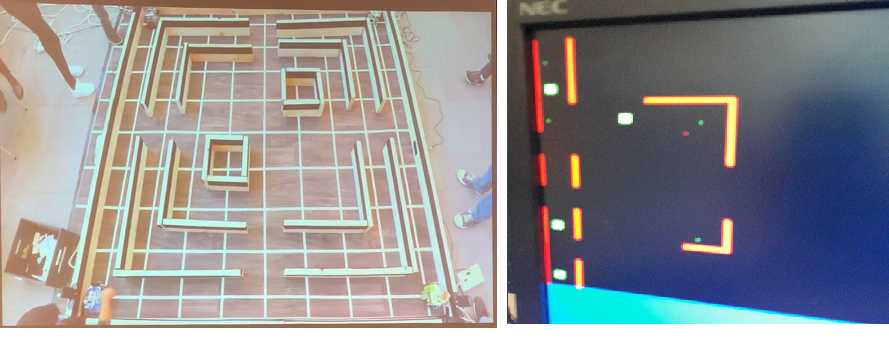
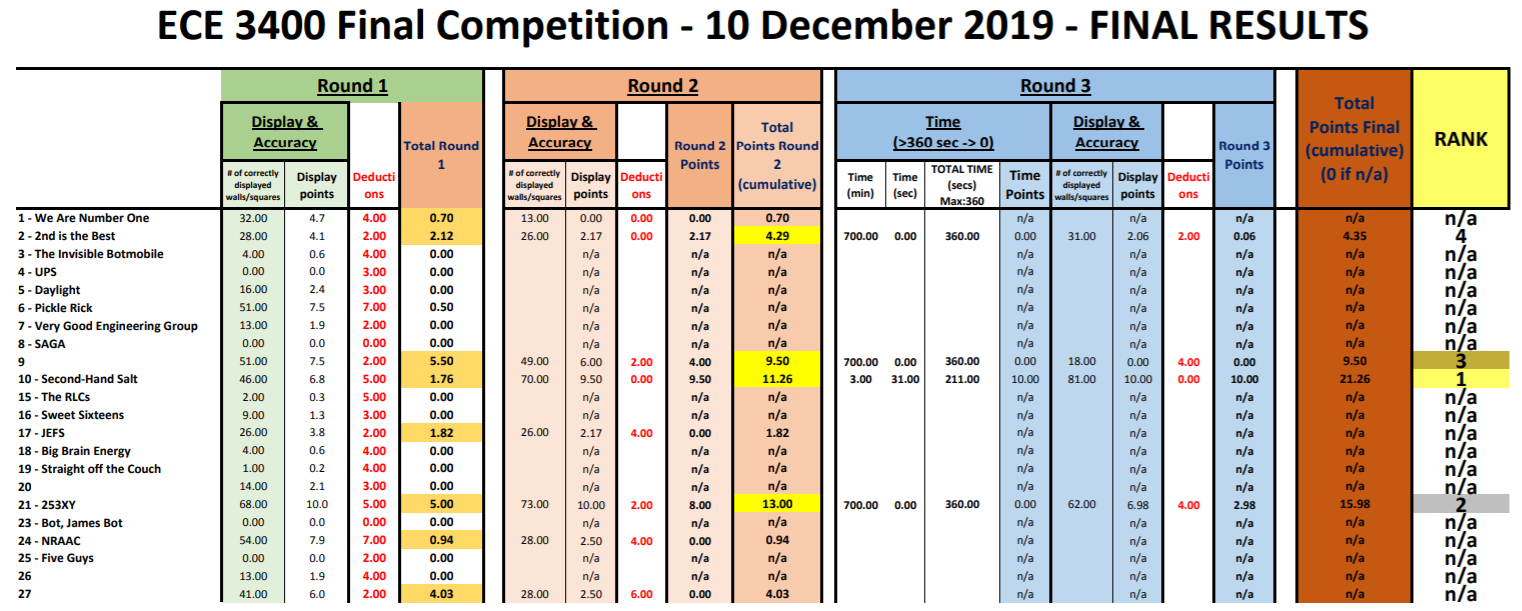
Below is the total point breakdown for all the teams across the three rounds. We (team sweet sixteens) mapped 9 squares of the maze correctly netting us 1.3 points while having 3 points deducted for collisions netting us 0 points. (Note negative point totals were shown as 0)
What Went Well
We were able to have the robot start on the correct tone during the competition despite it taking most of the two seconds that the tone was played. The maze was being drawn on our monitor as the robot navigated through the maze, which indicated that we were getting some information through radio from our robot as well. Line following and wall detection generally behaved correctly as the robot moved within the maze without running over walls and did not veer off the gridlines in the maze. The IR Emitters for other robots to detect us were functioning correctly, as some robots were able to detect that we were in the way and in response the other robots were able to turn around and avoid us. Our robot was able to sometimes detect that another robot was in our way and avoided colliding with the robot correctly without causing the navigation system to fail. For the little of our navigation DFS algorithm that we were able to run, it was mostly able to navigate correctly without losing its own position.
What Went Poorly
We believe that the competition environment being exposed to the outdoor light caused our robot detection to trigger several false positives while navigating the maze. The false positives ultimately caused the robot to travel back and forth between two locations, unable to progress in the navigation algorithm. Several times during the competition, other robots would collide with ours, causing it to miss intersections and effectively lose track of its own location. These factors unfortunately made us have to restart our own robot several times. While we were able to send correct information to our base station, we noticed that for most of the runs we were having a significant amount of missed packets on our radio leaving holes in our mapping and our robot's position tracker to mess up. We believe that this is probably a result of cross-talk between radios as well as possible interference from someone using incorrect pipes for the radio. All of these issues combined generally prevented our robot from having a good opportunity to properly navigate and map the maze.
Conclusion
Overall, our robot performed middlingly well on competition day. While our robot did not perform as it did in our testing in lab, it did prove itself to be mildly robust despite the unfortunate circumstances. It is unfortunate to think that such fixable problems as a too sensitive robot detection scheme and radio communication failrues caused so much trouble for our robot on competition day. We were also very happy with how several aspects of our robot performed such as the FFT, line and wall detection, maze mapping when the correct messages got sent, and our DFS algorithm when uniterrupted. Looking back, our team accomplished a lot this semester and we're proud of how all the hard work this semester came together.
Below is a video of our robot starting maze navigation on competition day: