What We Worked On
Lab 1
In this introductory lab, we became more familiar with the functionalities of the Arduino Uno and the Arduino IDE. Once we became more comfortable, we put together a robot and had it perform a simple task.
View Project
Milestone 1
Milestone 1 included designing and programming a robot that successfully follows a line and traverses a grid in a figure eight.
View Project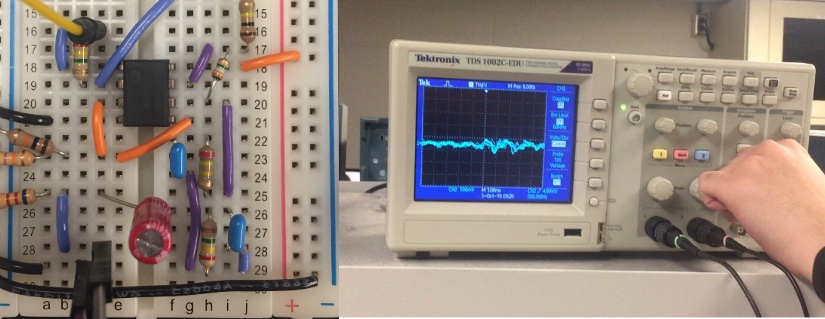
Lab 2
Lab 2 involved using Fast-Fourier Transform and developing analog circuitry to determine when a 950 Hz is being played.
View Project
Milestone 2
Milestone 2 included designing and programming a robot that successfully traverses a maze with right hand wall following.
View Project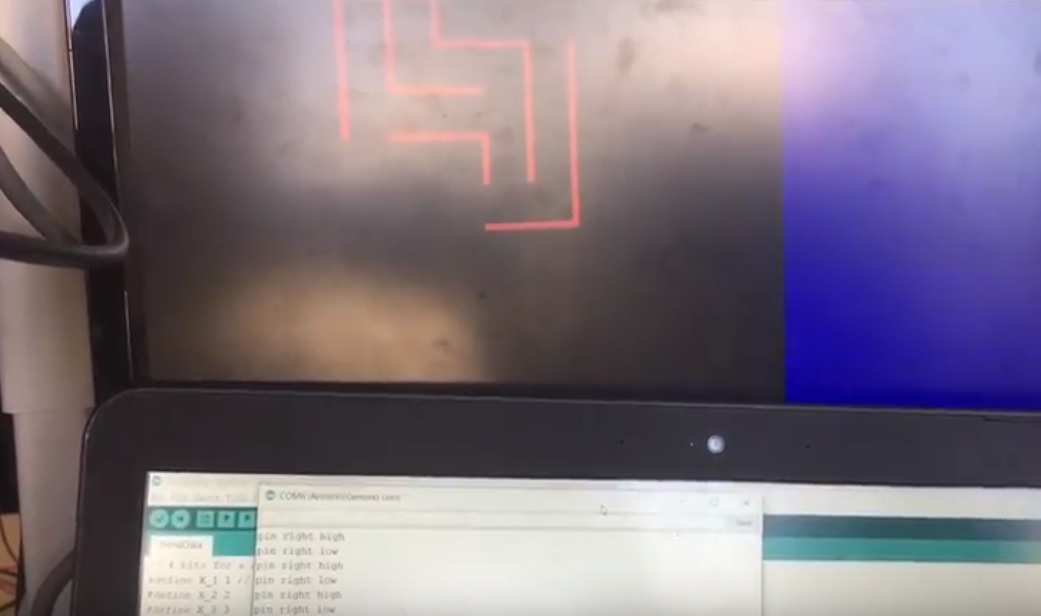
Lab 3
In Lab 3, we worked extensively with the FPGA to display desired pixels on the screen, which will be integral to maze mapping, as well as Arduino-to-FPGA communication.
View Project
Milestone 3
Milestone 3 involved designing and implementing a maze navigation algorithm that effectively explores mazes of arbitrary size and configuration.
View Project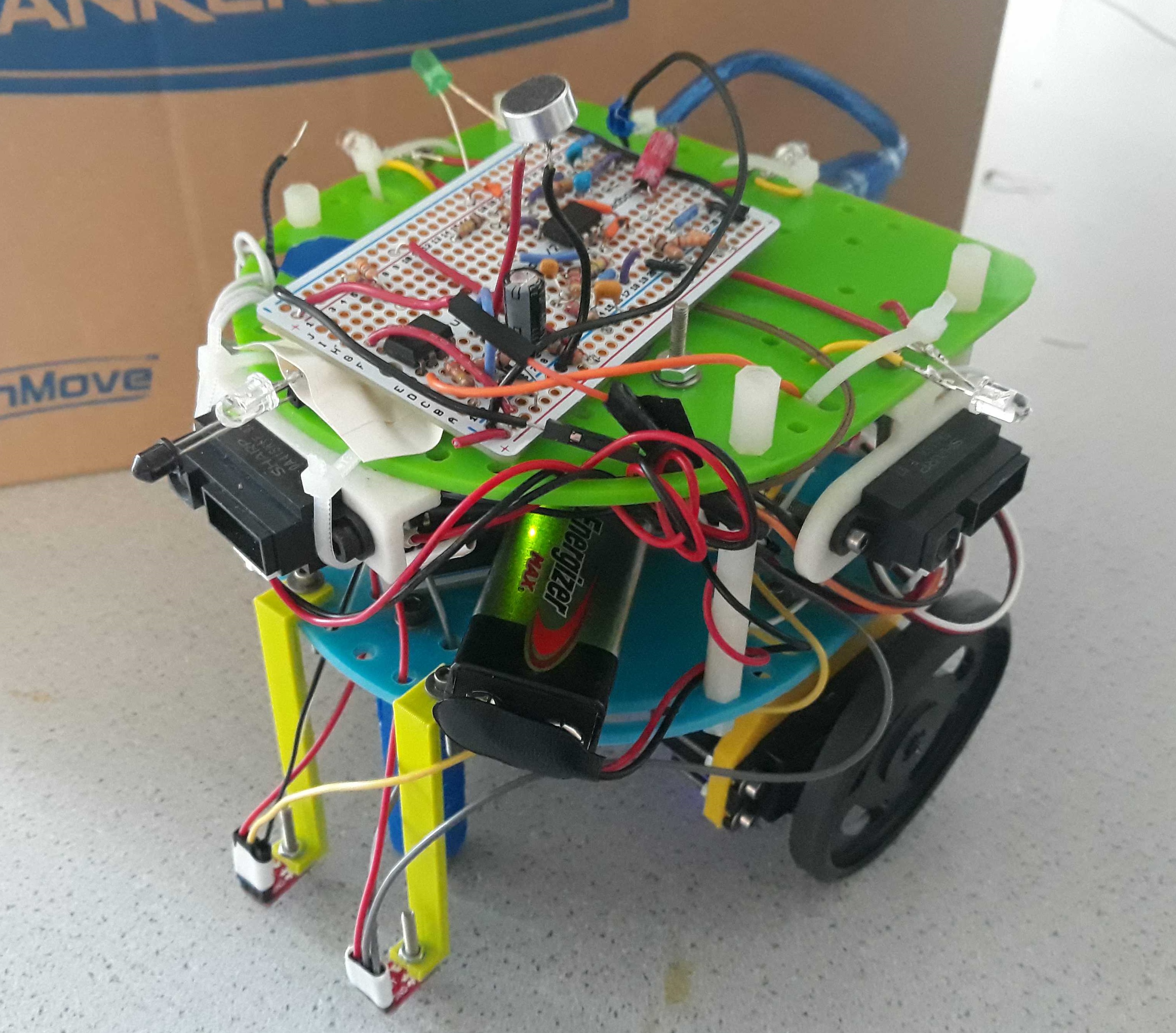
Lab/Milestone 4
In Lab/Milestone 4, we implemented radio communciation between the robot and base station as well as other robot detection, set up maze mapping on the screen using inputs from the radio, and finally integrated all circuits and components onto the robot.
View Project