jks253
Features
Lab 1 Goal
The goal of Lab 1 was to get the robot to the point where it could navigate a simple preset maze.
Lab notes
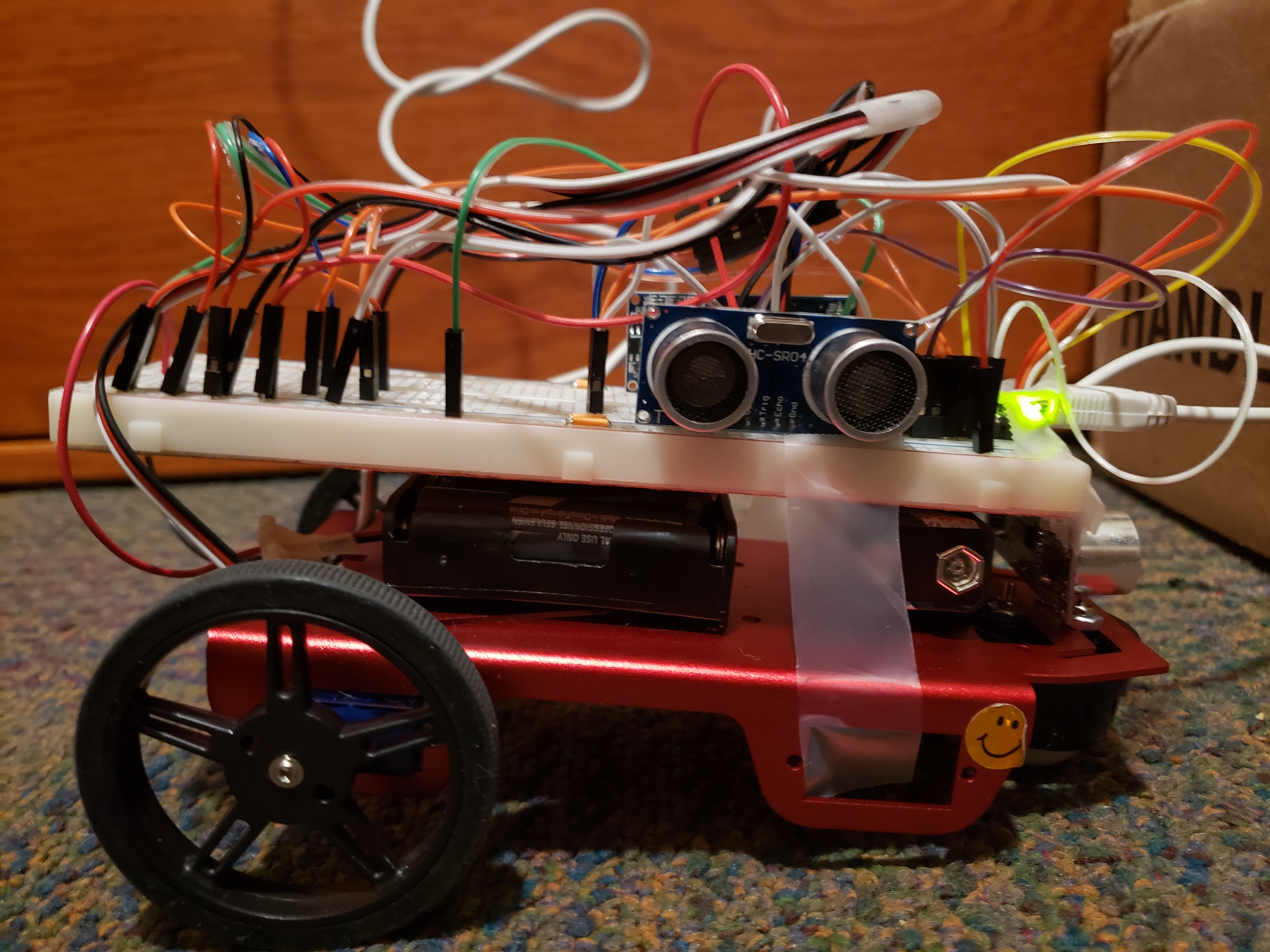
We constructed the breadboard, connecting the servo units to the power source and to control pins for the Arduino, which itself was powered by a 9V battery.
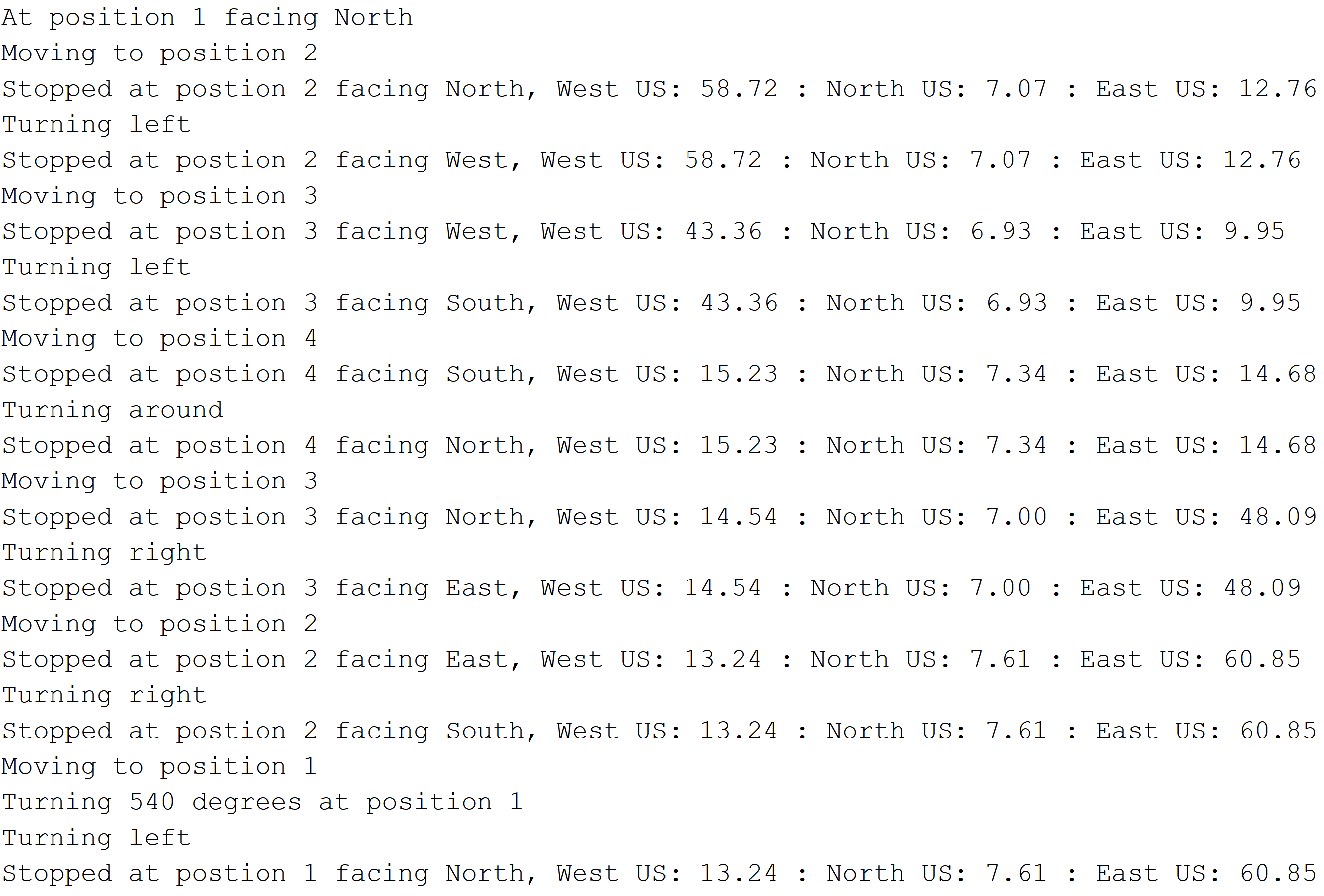
As per the first part of the lab, we assigned pins on the Arduino to control the servo motors and were able to command it to perform a series of preset commands, whereby it could move forward, spin around, and return to the starting point and orientation. We also dubbed the Arduino 'Jerry.'
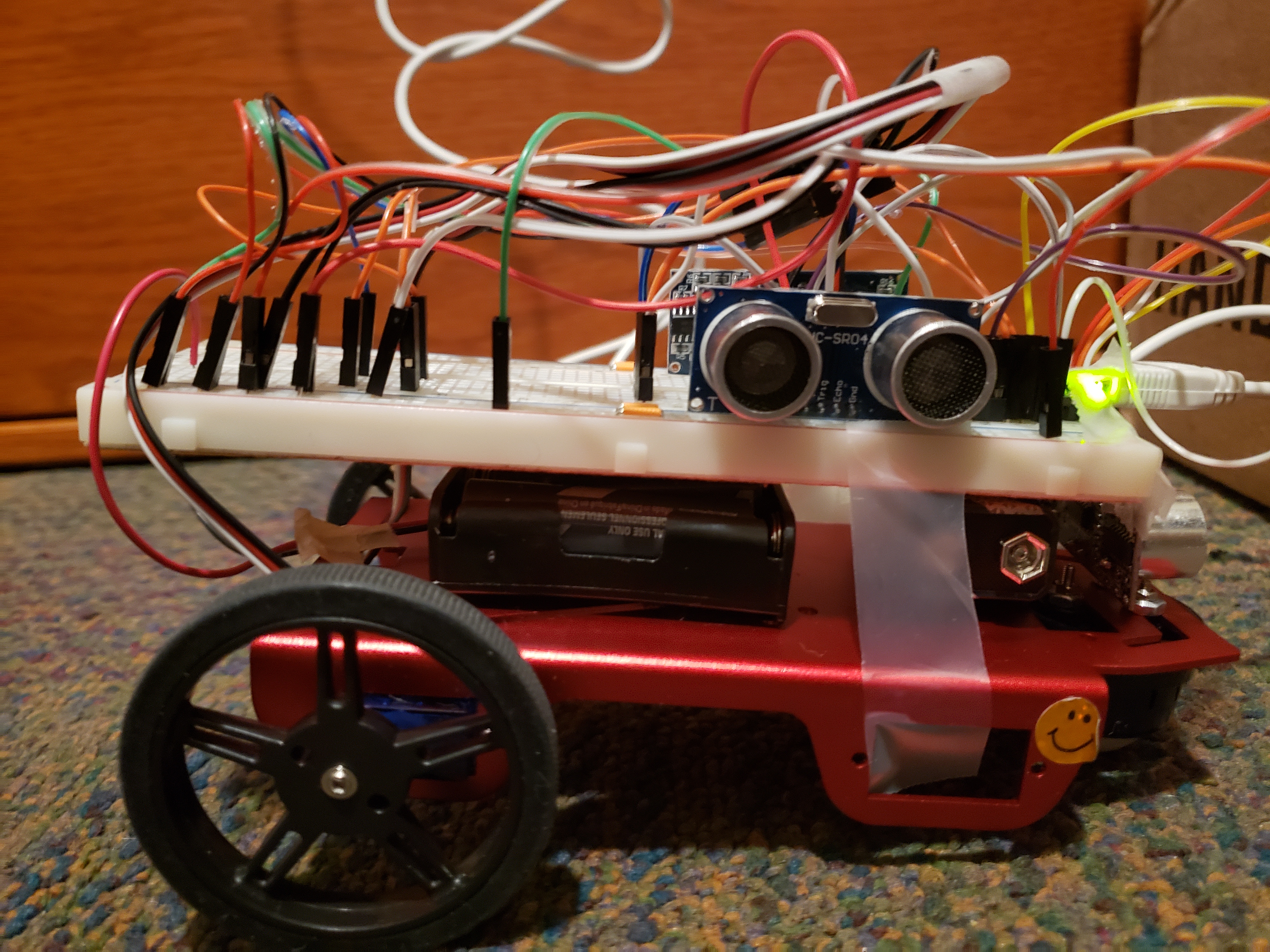
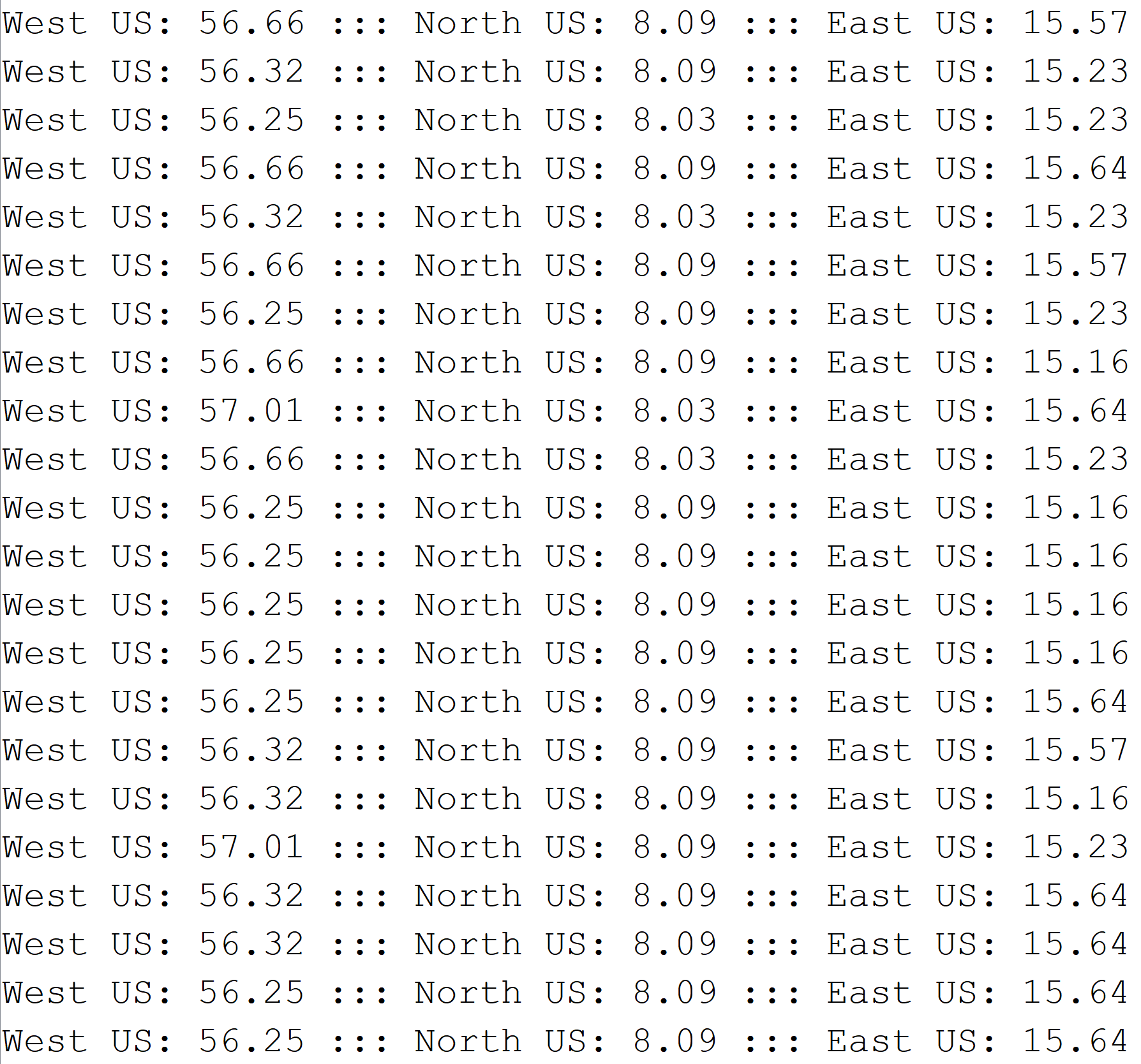
In the second part of the lab we installed the US components, assigned them to pins on Jerry and experimented with code to make sure they could accurately determine the distance to the closest object.
Problems and resolution
After many failed attempts, in which we could not the get motors to consistently travel at the same speed, or to get the US units to consistently return accurate data, we began intensive troubleshooting.
We discovered, after hard and careful replacement of every part of Jerry, that the part responsible for our torubles was the battery.
Immediately after replacement of said battery (and rewiring the US and servos to be powered directly from the 5V Arduino pins) everything worked as it should have in the first place. Calibrating for the angles, speeds, and distances again, we ended up with a robot capable of transversing the simple maze all on its own.