Lab 1: Ultrasonic Navigation
Objectives:
- Assemble the basic robot frame.
- Learn how to use the servo control code to make the robot move.
- Learn how to measure distances with the ultrasonic sensor.
- Learn how to use the serial monitor.
- Use the sensors and servos to navigate around a set course.
Materials:
- 1 robot frame
- 1 Arduino Nano Every
- 2 Servo motors
- 2 Wheels
- 1 caster wheel
- 3 ultrasonic sensors
- 1 breadboard
- Jumper wires
- Tape
- Battery packs
- Batteries
Servo Control
We used the servos and the delay function to move the robot in a specific pattern. We made it move forward approximately 20 cm, turn right 90 degrees, turn left 270 degrees, move 20 cm forward back to where it started, and then turn right 180 degrees, so it ends facing the same direction it started. A video of this can be seen below. This assignment required us to carefully adjust parameters and delays in order for the robot to turn correctly and move straight.
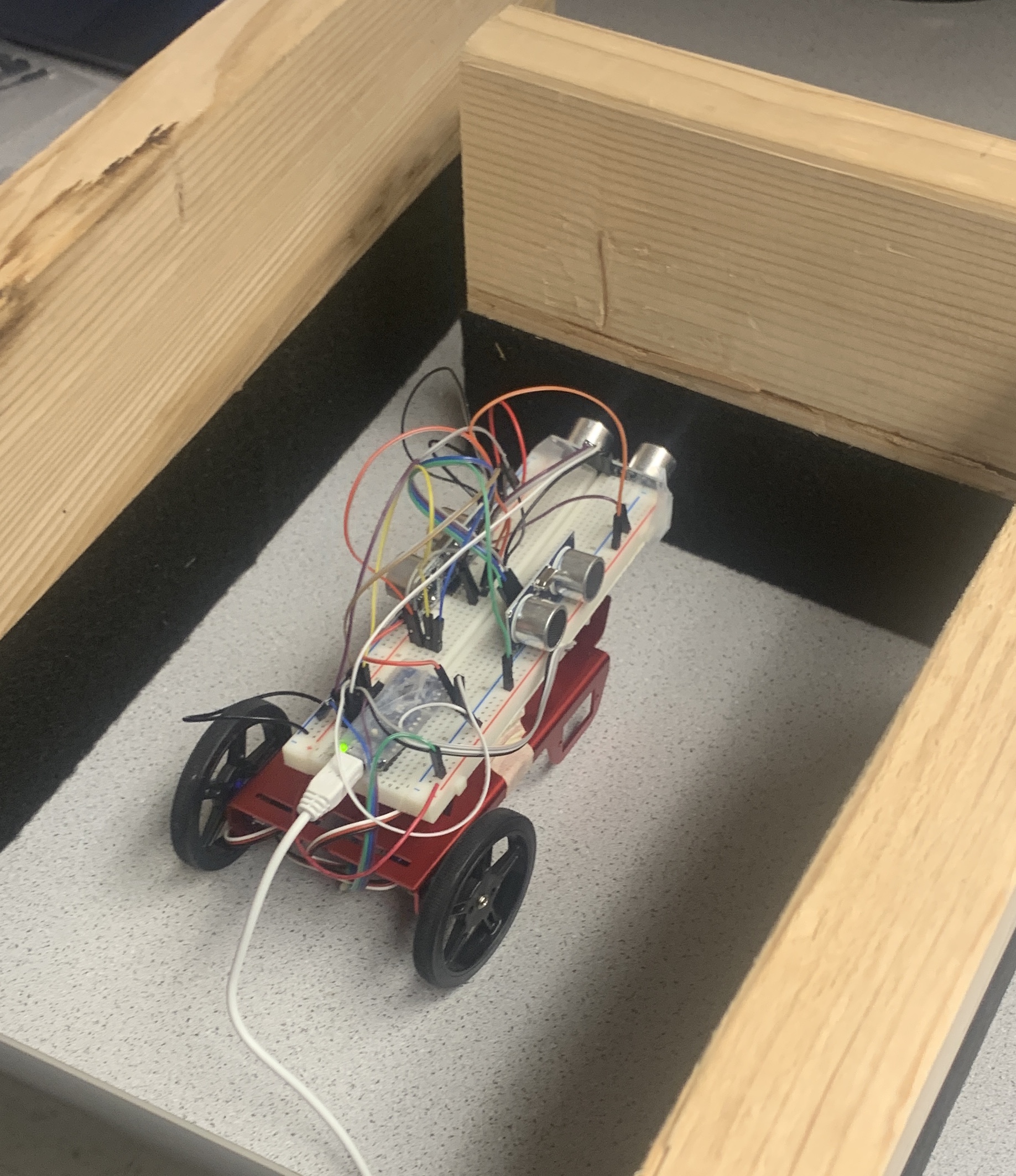
Ultrasonic Measurement
We next installed the ultrasonic sensors on the robot frame. We used the code supplied for this assignment to measure the distances on each sensor and output to the serial monitor. The video below shows the serial monitor output as I move my hand forwards and backwards in front of the left ultrasonic sensor. Once that was working, we positioned blocks set distances from the robot to ensure that the sensors were working properly. An image of this can be seen at the top of this page.
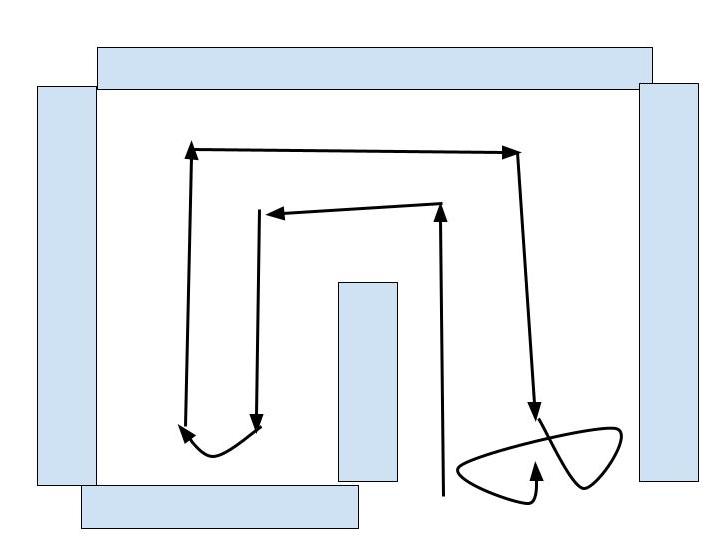
Course Navigation
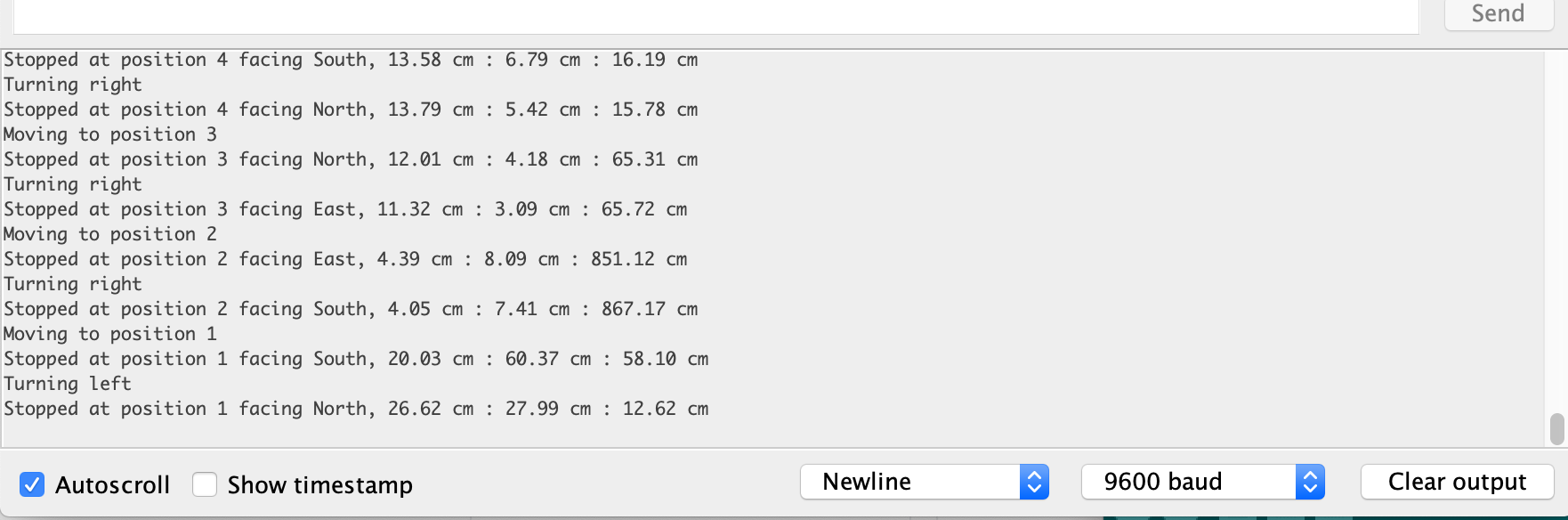
Finally, we programmed the robot to navigate around a set course. A diagram of the course can be found below. All of the turns had to be in place, even though they are not drawn as such in the figure. We had to use what we learned from the previous parts to succeed. We had to make sure that the turns were correct and that the robot moved straight. We also had to use the ultrasonic sensors to ensure that the robot turned when it needed to. We also needed to use serial communication to print out the robot’s position and distance measures. The largest challenge was the inconsistency. With the exact same code, we could have a few near perfect runs along with many failures, as well as different legs of the same run behaving differently, despite using the same movement code. After many attempts, we finally got it working. A video of this can be seen below the course image, and the serial monitor output can be seen below that. While it may look like the robot stopped early as it finishes forward of where it started, this was an active choice. The robot pivots near the back, and we did not have a lot of room between the end of the course and the end of the table. As such, we could not have it turn in a location where it would finish where it started without falling off the table.