Lab 4
Objectives:
The point of this lab is to characterize our robot cars so that we can leverage the remote control to familiarize ourselves with the capabilities of the hardware. This task sets us up with the necessary information needed to implement replicas of manual behavior with autonomous control and hopefully introduce some new behaviors that were otherwise impossible to perform with manual control.
Materials
- 1 x Cylone Fast Action Car
- 1 x LiPo 850mAh battery
Prelab
Category A Measurements
Car Dimensions
I took note of the dimensions of the car they maybe neccessary to account for ToF distance calibrations in the future and also I figured they might be helpful when preparing to integrate the ToF sensors on to the stunt car. Additionally, the dimensions come in handy when we want to create a mathematical model for the equations of motions for the robot both in a dynamic and static state. Since the robot has the ability to perform both translational and rotational motion, it is likely that quantities like torque, angular acceleration, angular speed, moment of intertia, translational acceleration, etc. can be computed from the data retrieved from the robot's dimensions and weights. See below for the dimensional quantities, I examined.

Category B Measurements
Car Drifts
One of the measurements, I recorded was car drift from a straight line path. I thought this was a particularly good metric to quantify because more often than not, we want our robot car to be a ble to navigate in a straight line path for an extended period of time. So knowing this metric might prove useful to implement the neccessary offsets required to direct and get there robot to a desired location if we want to go in "straight" line path. To get a good sense of car drift, we took six measurements at different car speeds denoted as "slow", "medium", and "fast in the below table. The main takeaway from this experiment is that the slower you drive, the less drift that accumulates over the course of the intended path.

Reliability of Axis Turns
We also, took an atempted to put a figure on the axis-turning ability of the car. We decided to measure this quantity because during stunt performances or even turning motions, it's good to know the natural overshoot of the robot car so that we can compensate ahead of time of get our intended turns and tricks in the correct positions we want them. You can imagine a situation where you want to strictly turn 90 degreees into a different plane but an overshoot of just 10-15 degrees extra leaves/returns your robot car back into the same plane you're trying to exit. This would be a good example of why know this metric is helpful with regards to the robot car. Nonetheless, to measure this data, we placed the robot on a minimally sloped floor and let the robot spin for on itself for 5 seconds. After repeating this demo six times in a row we found the following data listed below.
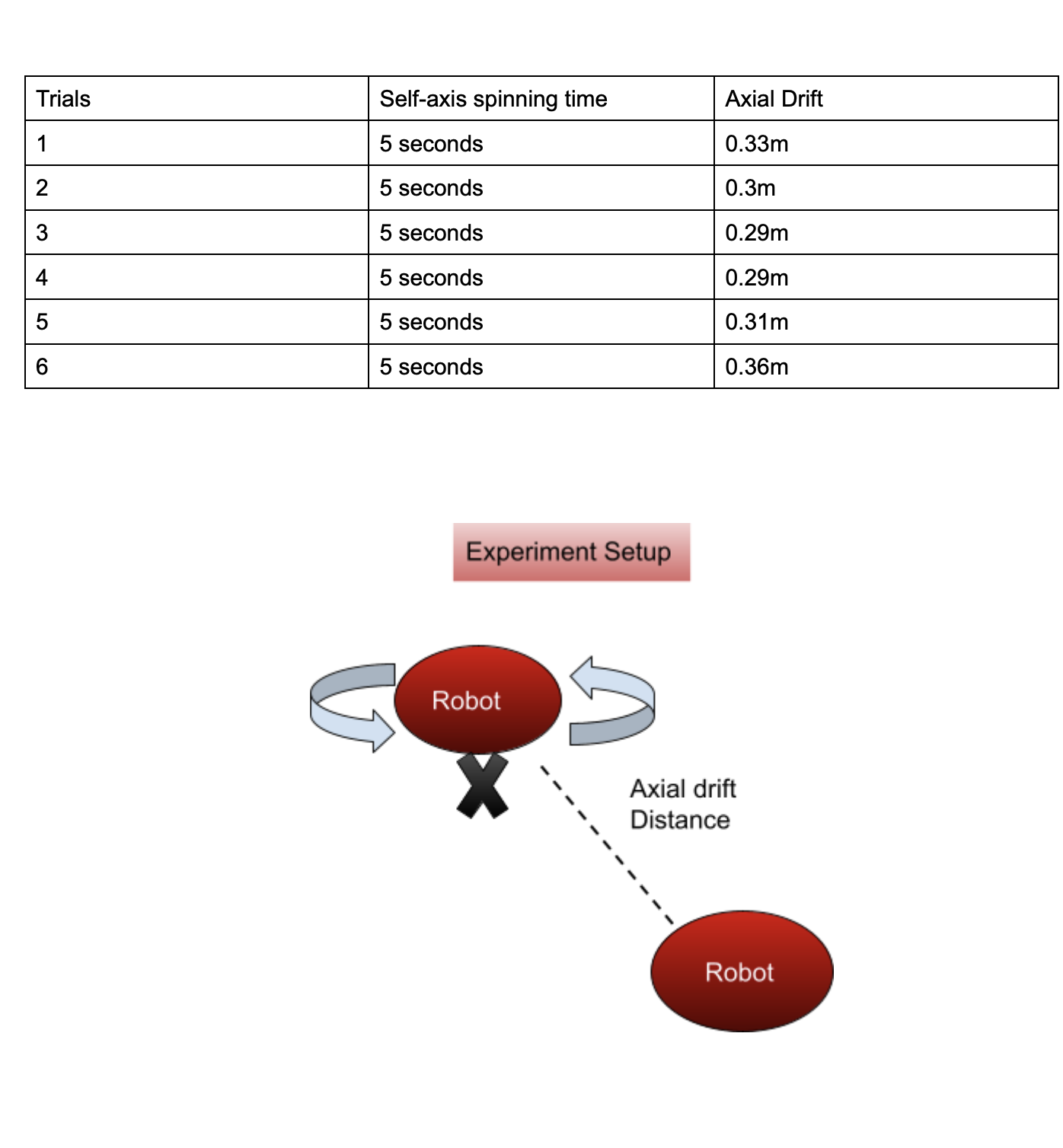
This is a short clip of the the robot rotating about its axis
Stunts
For the last segment of the car characterization, I choose to pull off some tricks on the robot car to see what manual control can yield with car. Below are a few of the stunts, I was able to pull off.
Input Controls = Go in the forward/backward direction for a bout 1-2 seconds and press the opposite direction of what you just pressed
Input Controls = Press the turn button and then immediately press the forward or backward button to let one wheel be the axis of rotation
Acknowledgement
I worked with Anya Prabowo to organize and perform the experiments mentioned above