This is Lab 0. We categorized 41 resistors by hand.
Lab 1
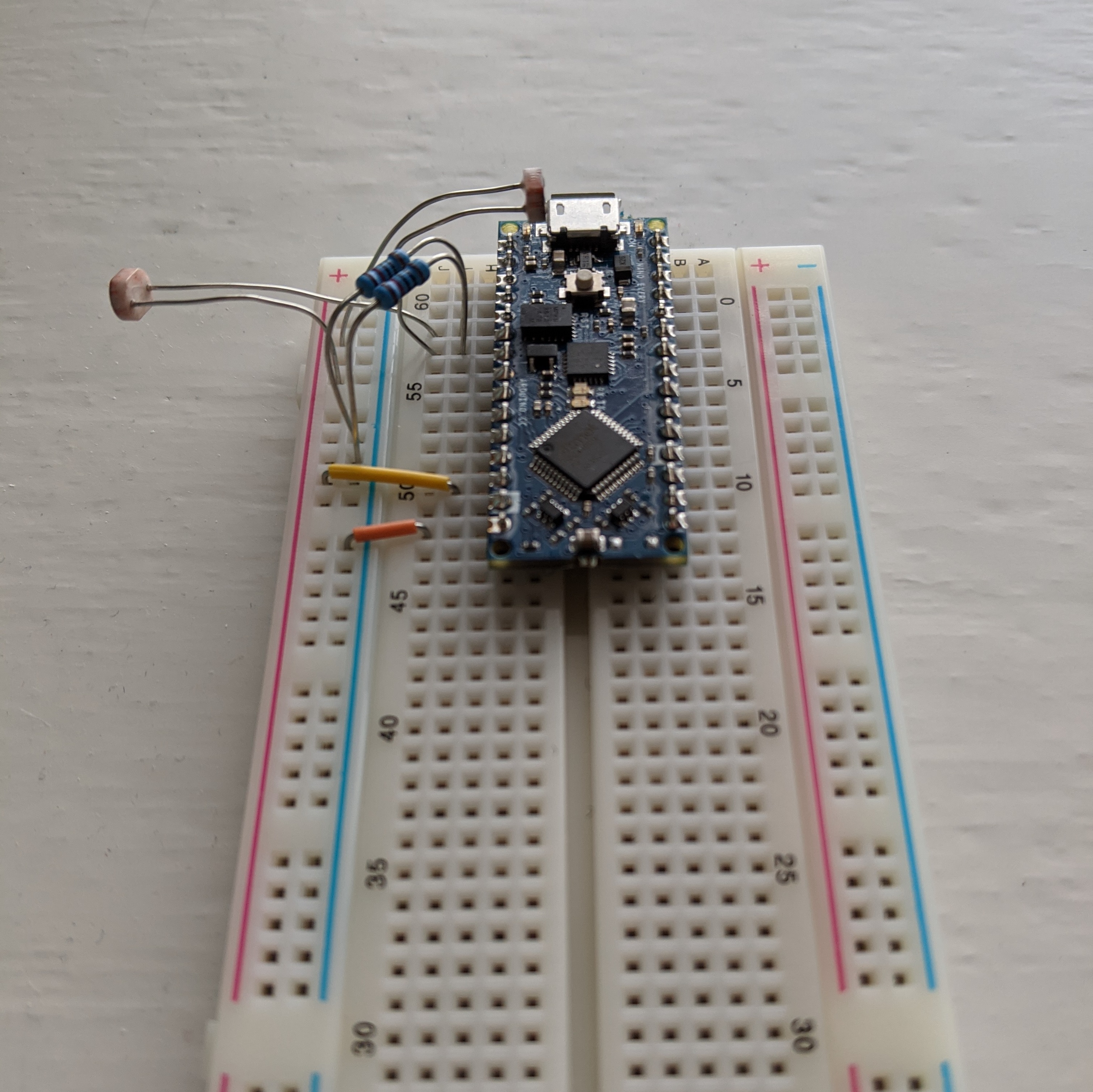
In this lab, I learned to program my Arduino (the Nano Every),
and used it to read the voltage values from two photoresistor circuits
to set up the light sensing capability of my light‐following robot.
Lab 2
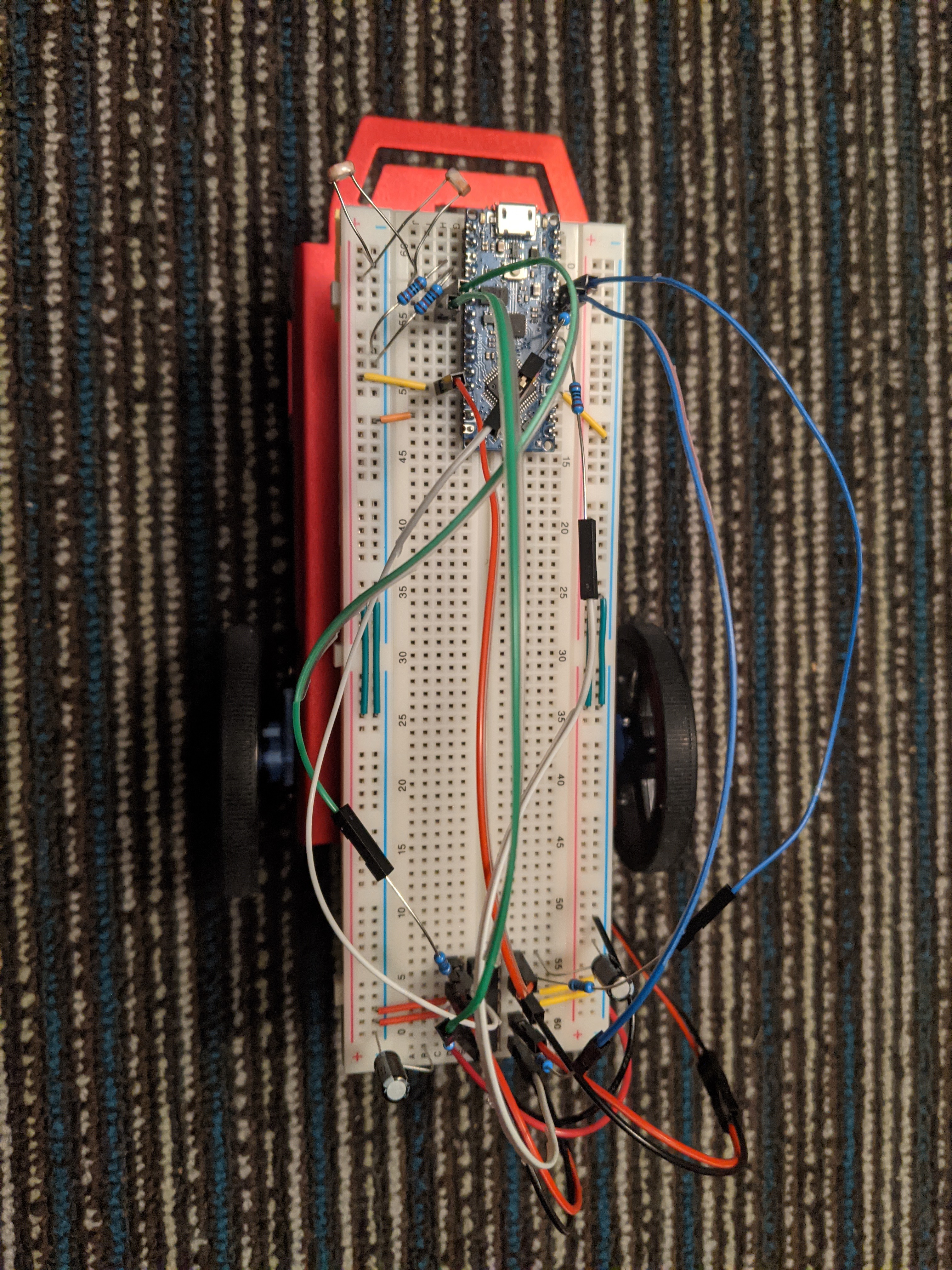
In this lab, I integrated what I did in lab 1 (with the photoresistor circuits) with motors
in order to actuate the robot and turn it into a full-fledged light-following robot.
Lab 3
In this lab, I implemented and tested passive and active filters and compared
them with what was theoretically predicted.
Lab 4
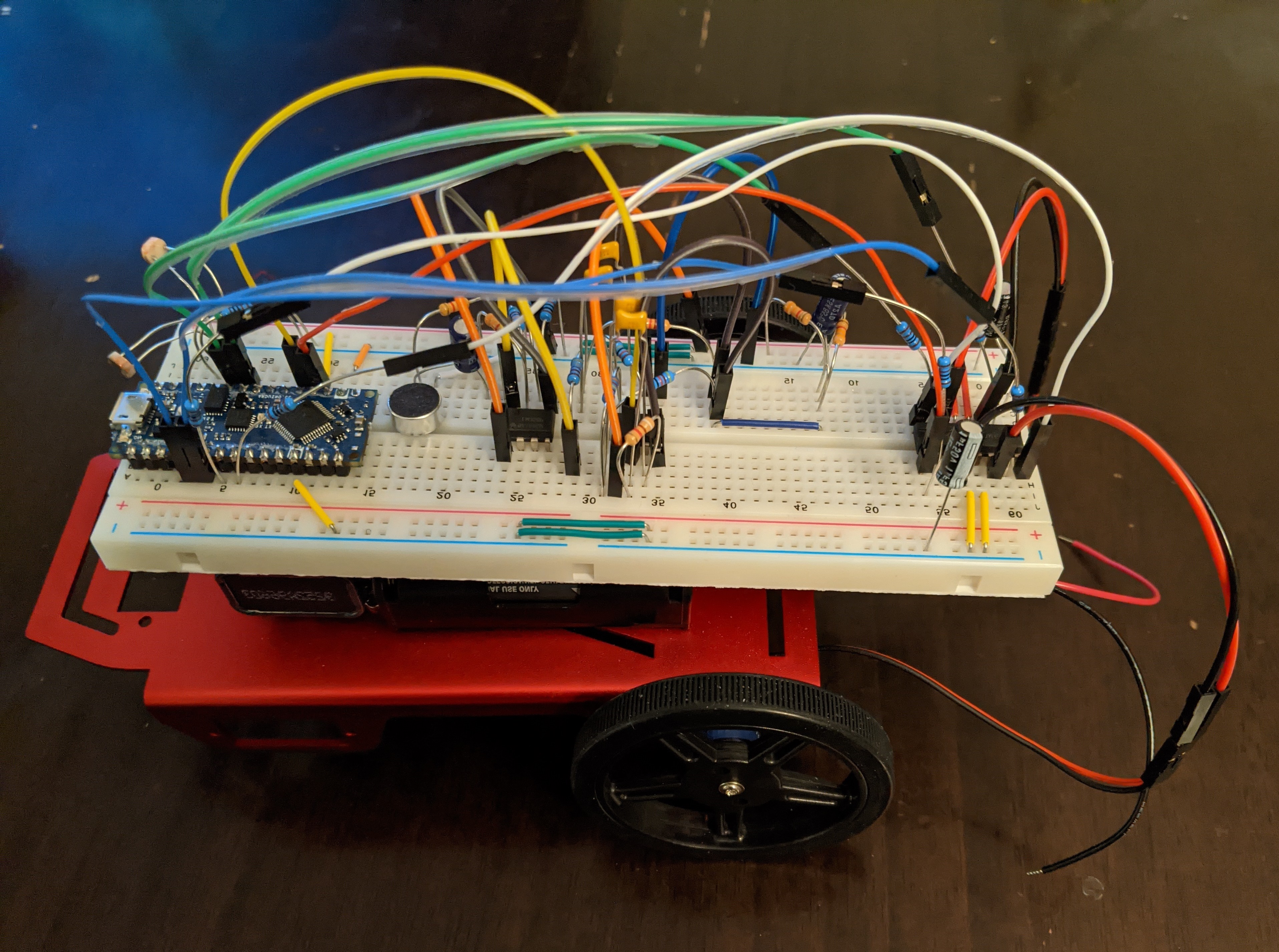
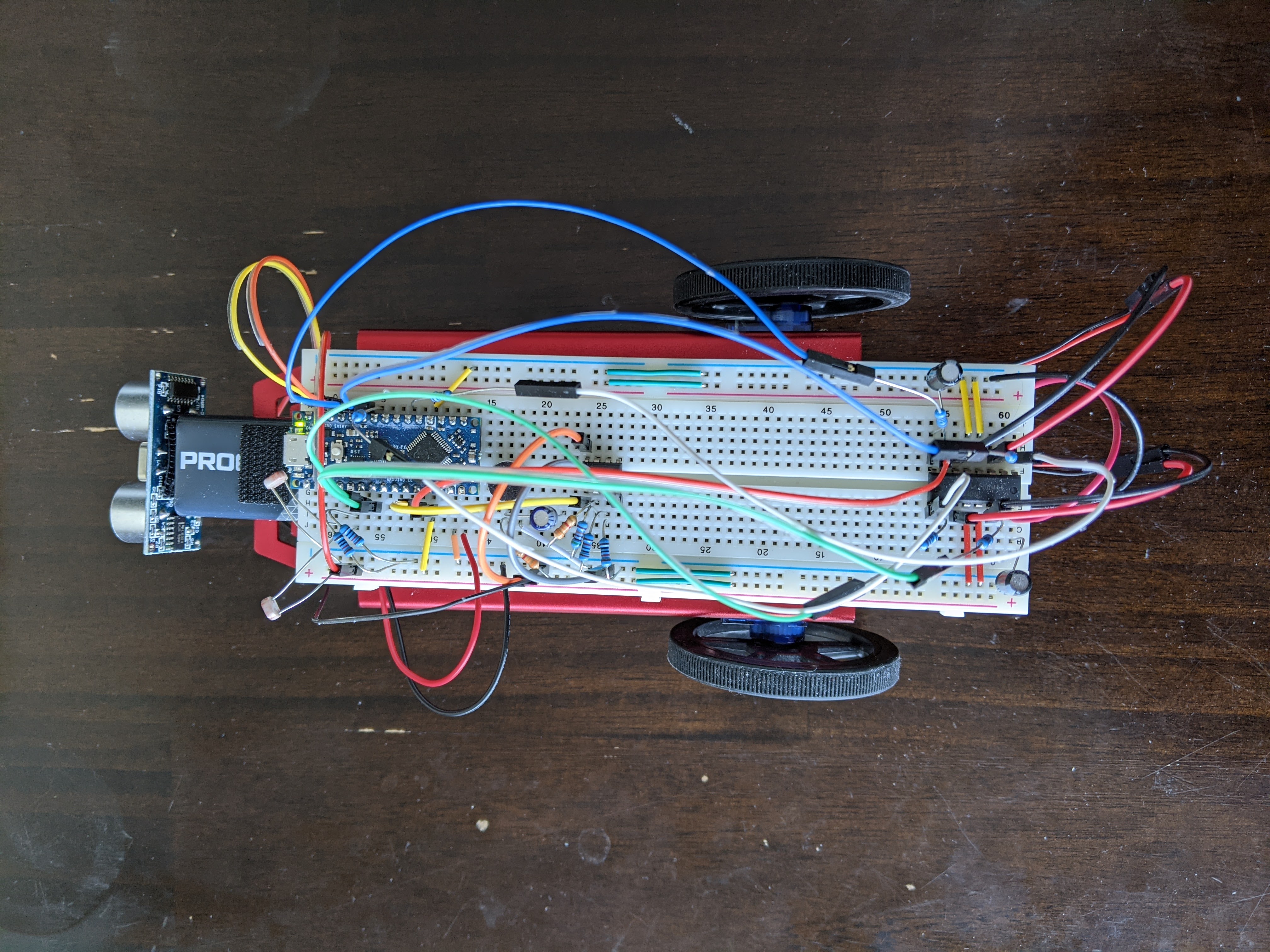
This lab was split in two parts. In the first part, the robot activated after a specific frequency was detected and turned in place detecting obstacles.
In the second part, I turned the robot into a light-following, obstacle-detecting robot.
Submarine
Lorem ipsum dolor sit amet, consectetur adipisicing elit. Mollitia neque assumenda ipsam nihil, molestias magnam, recusandae quos quis inventore quisquam velit asperiores, vitae? Reprehenderit soluta, eos quod consequuntur itaque. Nam.