Milestones are tasks we were able to complete by
applying the skills we learned in labs.
Milestone 1
In this milestone we used IR line sensors to program the robot to follow a straight line and follow a figure eight path mapped out on a grid!
Milestone 2
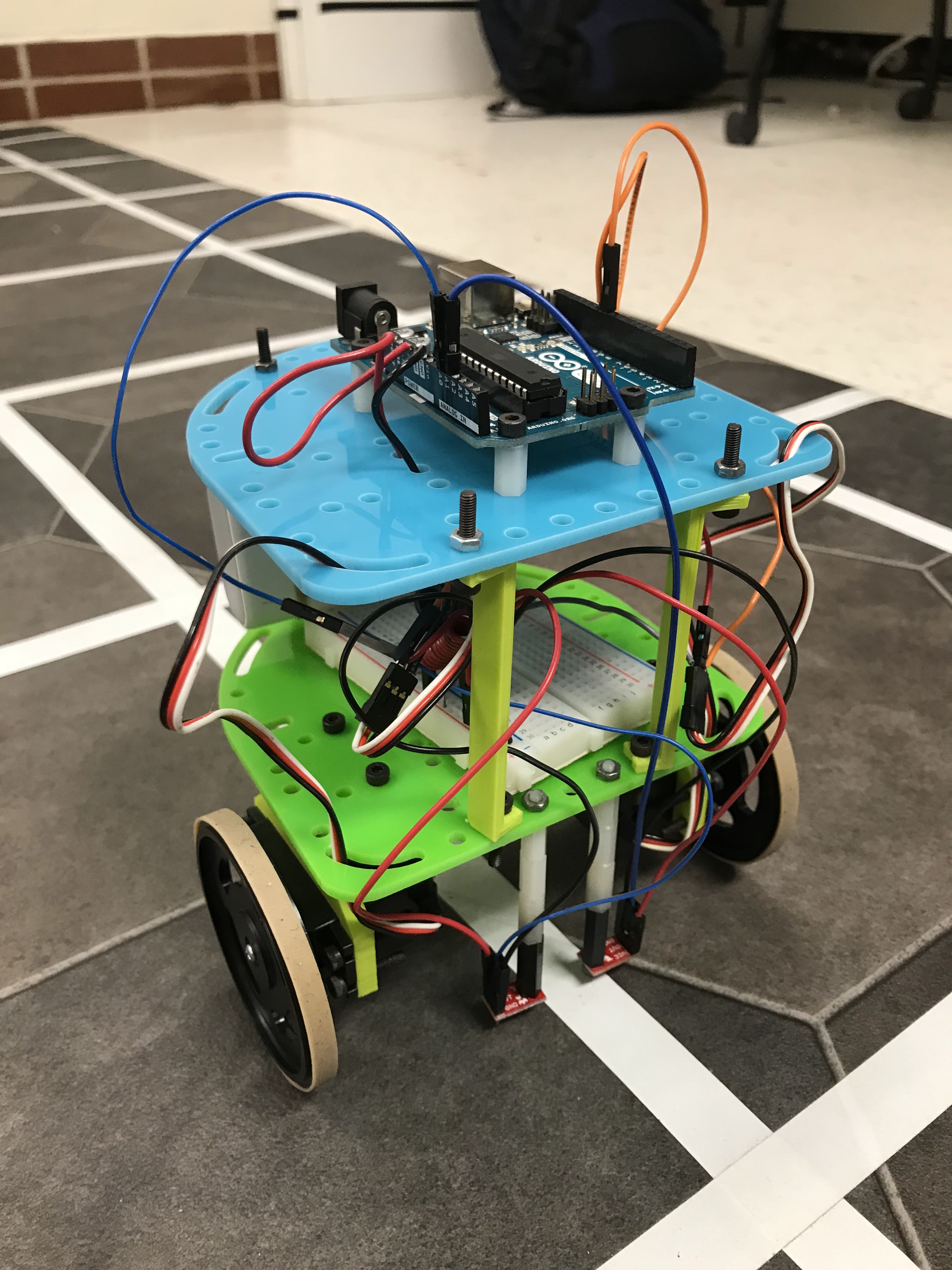
In this milestone we integrated line sensing from Miletsone 1 with wall detection.
Milestone 3
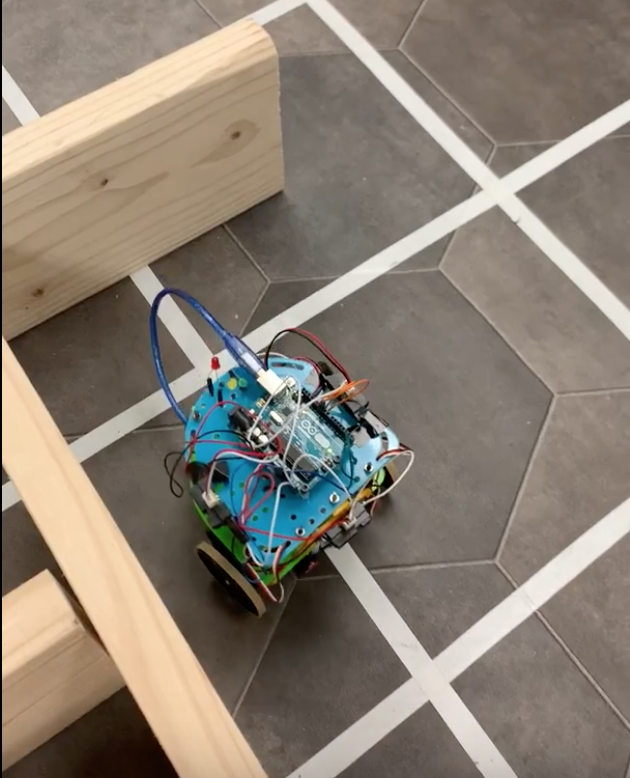
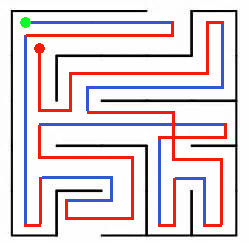
In this milestone we added robot detection and developed a maze mapping algorithm.

Milestone 4
In this milestone we implemented radio communication between our robot and the base station. We also perfected robot detection.