Lab 3a - Characterize Your Car
Objective
To familiarize with capabilities of the hardware and explore its specifications.
Materials
Specifications
- Dimensions of the car (LxWxH): 6.5in by 5.5in by 4.5in
- Weight: 458g (approx 1lb)
- Charging time: 5-6 hours
- Battery life: 10-20 minutes
Experimental Data/Calculations
Braking DistanceIn the first experiment, the robot came to a complete halt in 81 inches from point where no controls were applied. In the second experiment, we applied brakes in the opposite direction of motion that caused the robot to roll and halt in approxiately 35 inches.
Range of SpeedThe range of speed was calculated by using a video and knowing the distance traveled between two points. Through the video, you can find the time traveled between two points and use that to get max speed of 0.836 m/s when the robot is at full charge. This means the robot's range of speed is from 0 to 0.836 m/s.
Surfaces- Carpet - cannot spin about its z-axis
- Wooden floors
- Concrete
- Tiles
- Marble
- Rolling on land
- Straight state in water
- Rolling in water
The robot is capable of turning about its own axis as long as the surface does not create too much friction, like a carpet.
Manual control relability- Starting from approx. 4.5m at full speed, how close can you get to a wall and stop?
Approximately 2.5 ft - Can you reliably reproduce tricks?
We were able to reproduce Spindive 540 and Perpflip 720, but unable to describe the controls that will lead us to this trick. The tricks are not easily reproducable and we were able to do them out of sheer luck. But we captured it on video! :) - Can you make the robot balance on one set of wheels (front or back)?
Nope. I tried to balance the robot on its wheels. However, the response time between the robot and the control input from the controller felt delayed.
Collaborator: Charles Barreto
Lab 3b: Characterize Your Virtual Robot
Objective
- Become familiar with the simulator and the virtual robot.
- Learn how to start/stop the simulator
- Learn how to start/stop the simulator
- Learn how to perform teleoperation using your keyboard
Perform Test on Virtual Robot
To set up your virtual environment refer to this link. For setting up the simulation refer to this link.
I performed some basic tests on my virtual robot using the keyboard teleoperation tool. In the video below, you can see the virtual robot can be controlled through using the keyboard keys (u,i,o,j,k,l,m, comma and period).
If anyone wondered what would happen if I were to "kidnap" the robot with my mouse, the result is very anti-climatic. Here's a video to see what happens:
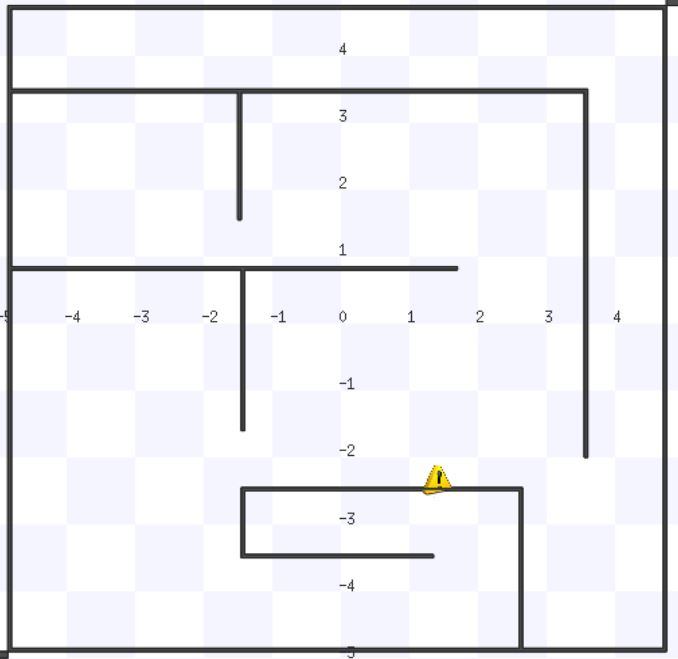
I wanted to test the boundaries of the given map and what would happen if the robot was to run into
the wall or placed outside the wall. If the robot runs into a wall, it becomes an exclamation mark
as shown in the picture below.
If the robot is placed outside the wall, the robot doesn't recognize this as a problem as it would have if it ran into a wall. In the future, if the robot somehow reaches outside the intended boundaries, we would lose the robot. The video below demonstrates that the robot functions even when placed outside the intended boundaries.